
http://m.blog.csdn.net/article/details?id=
简言之,pitch是俯仰角,是“点头“
yaw是偏航角,是‘摇头’
roll是旋转角,是“翻滚”
欧拉角是表达旋转的最简单的一种方式,形式上它是一个三维向量,其值分别代表物体绕坐标系三个轴(x,y,z轴)的旋转角度。这样的话,很容易想到,同样的一个三维向量,代表了绕x,y,z的旋转值,先进行那个旋转是否对结果有影响呢?显然是有影响的,可以拿着你的手机试一下,不同的旋转顺序会代表不同的旋转结果。所以,一般引擎都会规定自己的旋转顺序。
下面三张动图形象的表示了欧拉角的旋转方式。第一张是绕x轴旋转pitch,第二张绕y轴旋转yaw,第三张是绕z轴旋转roll。


绕三个轴的旋转值pitch,yaw,roll来自航空界的叫法,翻译为俯仰角,偏航角,翻滚角,非常形象。它们不一定如上所述,一定分别代表绕x,y,z的旋转值。
从英文意思出发,roll:是卷;滚动,转动;辗的意思;
yaw是(火箭、飞机、宇宙飞船等)偏航的意思;
pitch是倾斜;投掷;搭帐篷;坠落的意思;
所以,roll的意思是翻滚,就是绕着机身所在的那个轴。yaw是偏航的意思,偏航就是绕着重力方向为轴。pitch倾斜、坠落的意思,坠落就是以翅膀所在的直线为轴发生旋转。
另外值得注意的是,pitch值是不能超过90度,这里牵扯到了万向锁的知识,不再多说,网上很多讨论。
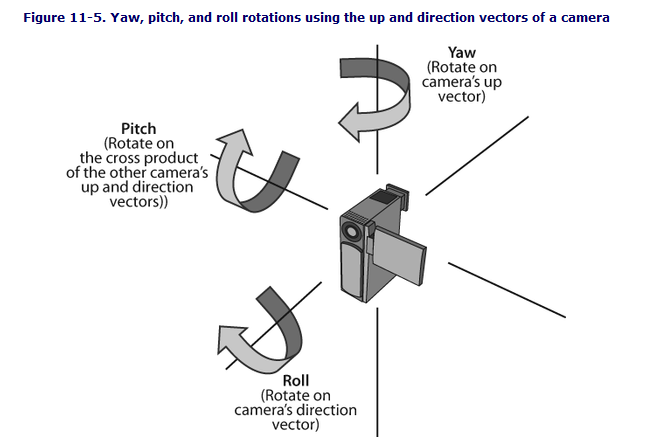
下面这张图是以摄像机的角度来阐述欧拉角的,可以加深理解。可以看到,pitch,yaw,roll在这里并不是常见的代表绕x,y,z的旋转值。
今天的文章 欧拉中的俯仰、横滚、偏航角分享到此就结束了,感谢您的阅读。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
如需转载请保留出处:https://bianchenghao.cn/bian-cheng-ji-chu/99722.html