
CAN(Controller Area Network)是一种标准化的串行通信协议,广泛应用于汽车电子、工业自动化、医疗设备等领域。自20世纪80年代由Bosch公司开发以来,CAN协议因其高可靠性、实时性和成本效益,成为嵌入式系统中一种重要的通信方式。本文旨在为初学者提供关于CAN通讯的详细介绍,帮助读者理解其基础概念、工作原理、应用场景及发展趋势。
1. CAN通讯的基本概念
1.1 CAN的定义
CAN是一种多主控、同步串行通信协议,主要用于嵌入式系统之间的数据交换。它允许多个节点通过一个双线(CAN_H和CAN_L)总线同时通信,而不会发生冲突。
1.2 CAN通讯的特点
- 高可靠性:CAN采用差分信号传输和错误检测机制,如CRC(循环冗余校验)和错误计数器,确保数据传输的准确性。
- 实时性:CAN协议的仲裁机制允许具有高优先级的消息在总线上获得优先传输,满足实时应用的需求。
- 灵活性:CAN总线可以连接多个节点,并且每个节点都可以自由发送和接收消息。
- 成本效益:由于CAN的硬件需求较低且布线简单,适用于大规模应用。
2. CAN通讯的工作原理
2.1 数据帧结构
CAN协议定义了四种帧类型:数据帧、远程帧、错误帧和过载帧。其中,数据帧是最常用的一种,用于实际的数据传输。
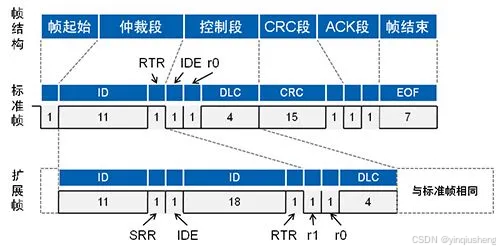
数据帧包括以下几个字段:
- 起始位(Start of Frame, SOF):标志帧的开始。
- 标识符(Identifier):表示消息的优先级和内容,标准帧为11位,扩展帧为29位。
- 控制字段(Control Field):包括数据长度码(DLC),表示数据字段的字节数。
- 数据字段(Data Field):包含实际传输的数据,最多8字节。
- CRC字段(CRC Field):用于错误检测。
- ACK字段(Acknowledge Field):接收节点确认接收到数据。
- 结束位(End of Frame, EOF):标志帧的结束。
2.2 仲裁机制
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
如需转载请保留出处:https://bianchenghao.cn/bian-cheng-ri-ji/52599.html