
最近要用到Vicon进行室内定位,实验室资料较少,那就做下整理吧。
一、所需软件
Vicon由一组红外摄像头和Giganet(类似于交换机)组成。
主要用到两个软件,Vicon Tracker主要负责摄像头的校准以及刚体模型的标识;ViconDataStreamSDK负责查看刚体的位置位姿信息并通过局域网将消息发送给ROS。

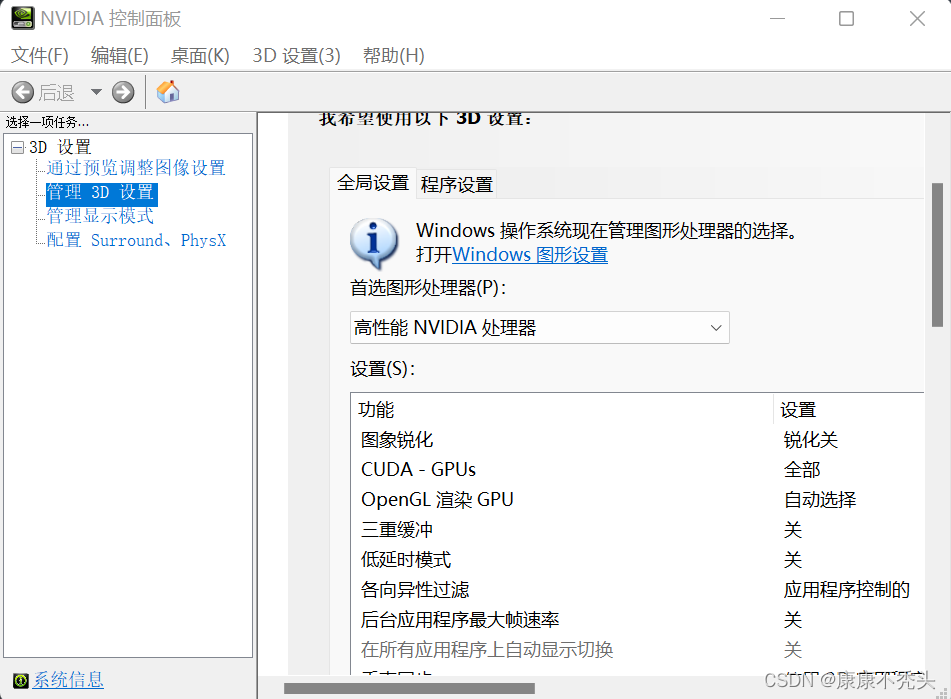
我的电脑在打开Vicon后一直报错,联系售后了解到需要打开NVIDIA控制面板开启高性能NVIDIA处理器,一般打开就报错都是显卡的问题。
二、前期准备
1.关闭Windows防火墙
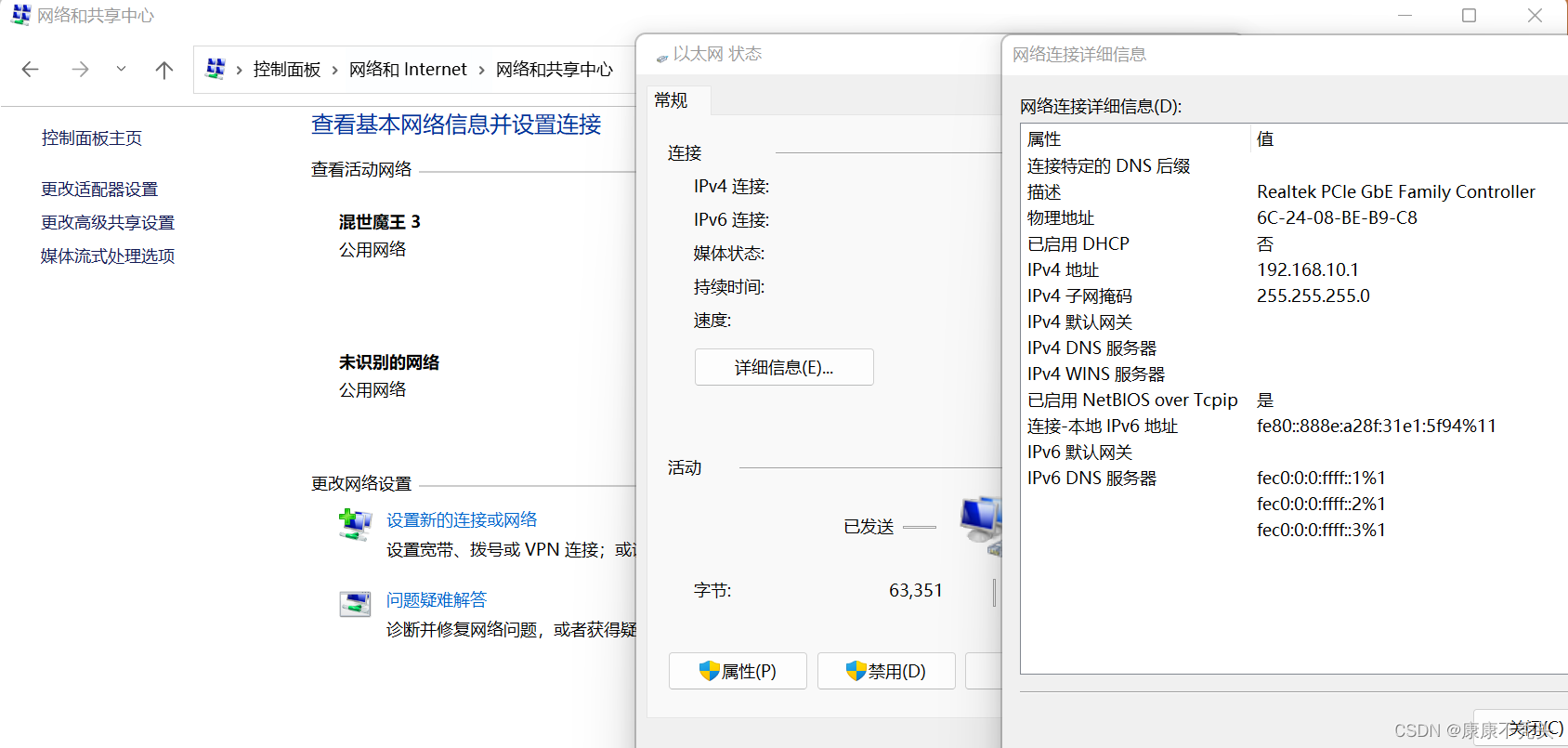
2.用网线将交换机和电脑连接起来,设置以太网IP地址192.168.10.1,掩码255.255.255.0
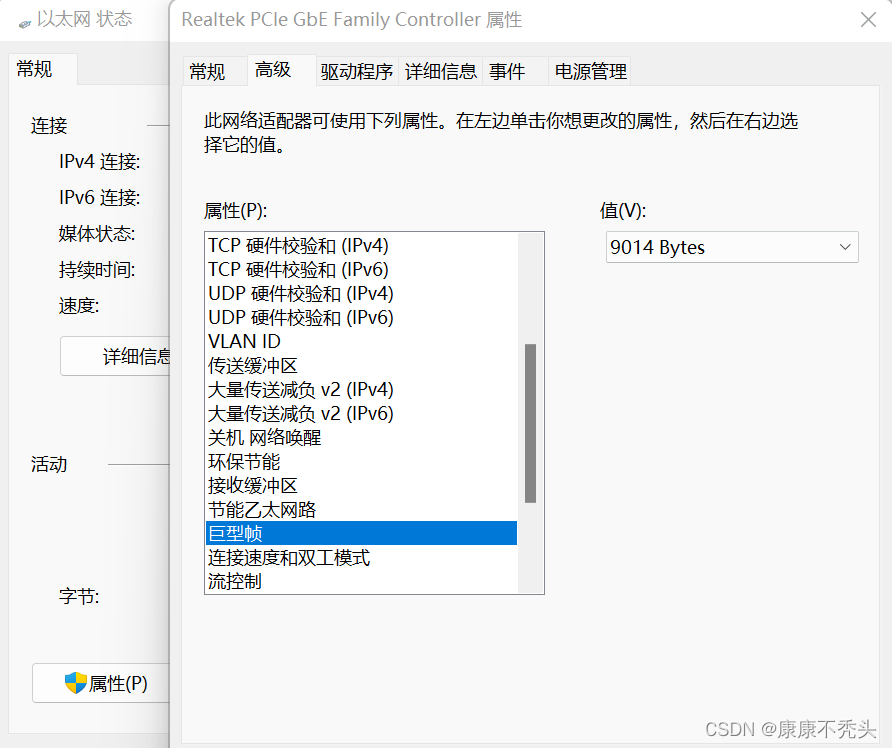
3.配置以太网属性,将巨型帧、传送缓冲区和接收缓冲区的值调到最大
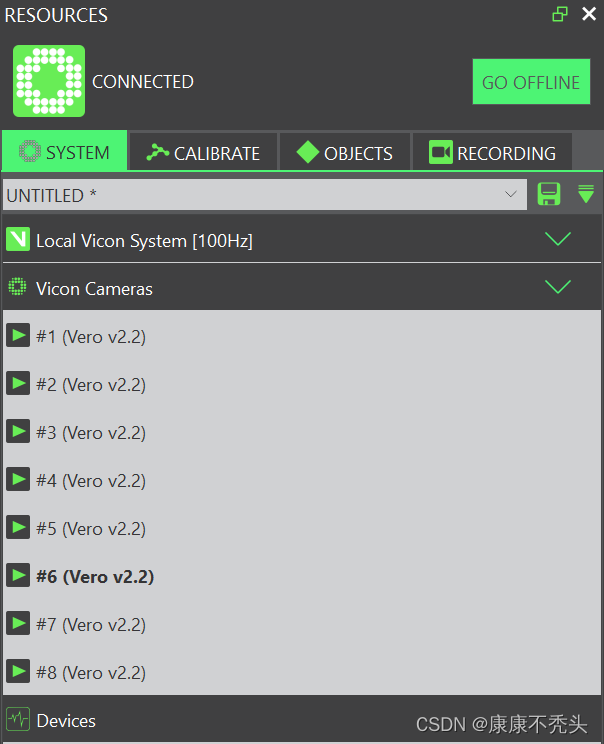
4.打开Vicon Tracker,它会自动检测连接的摄像头,全绿表示摄像头功能正常。
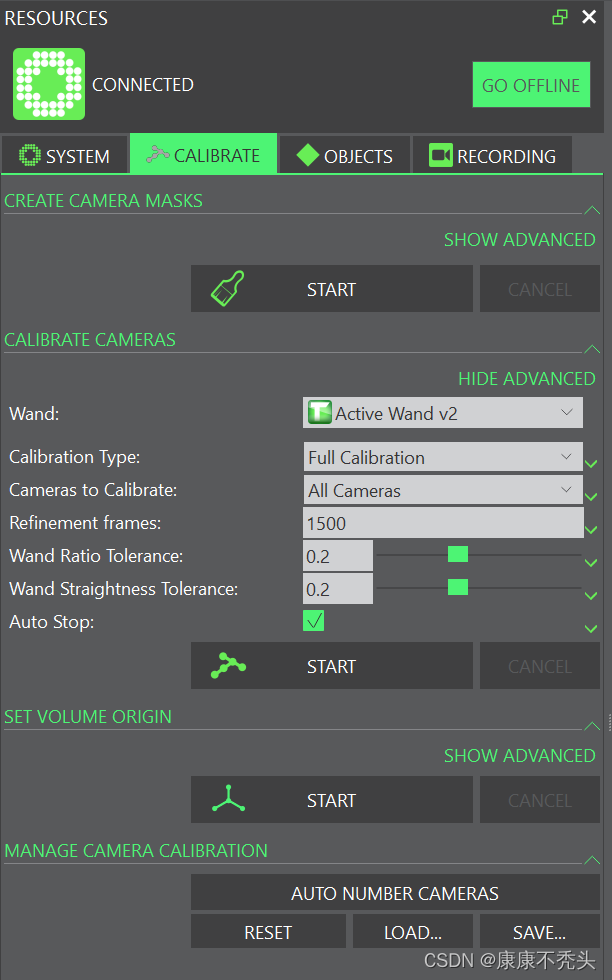
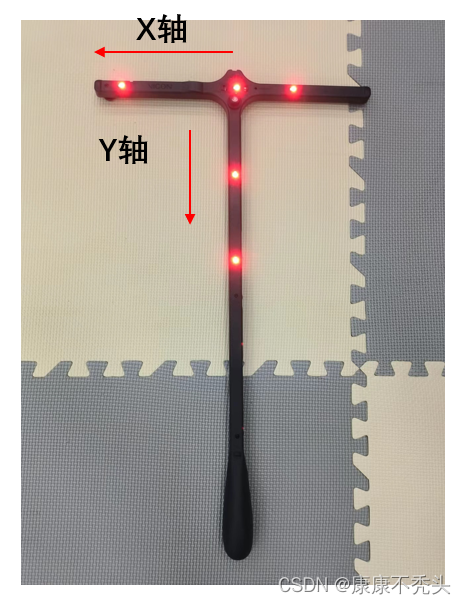
5.切换到CALIBRATE界面,先CREATE CAMERA MASKS去除相机镜头的噪声点;接着打开标定杆CALIBRATE CAMERAS对镜头进行校准,其中Wand选择最新的Active Wand v2,待镜头灯光都闪绿后,所有镜头校准完成;最后将标定杆放在合适位置设置原点和坐标系。
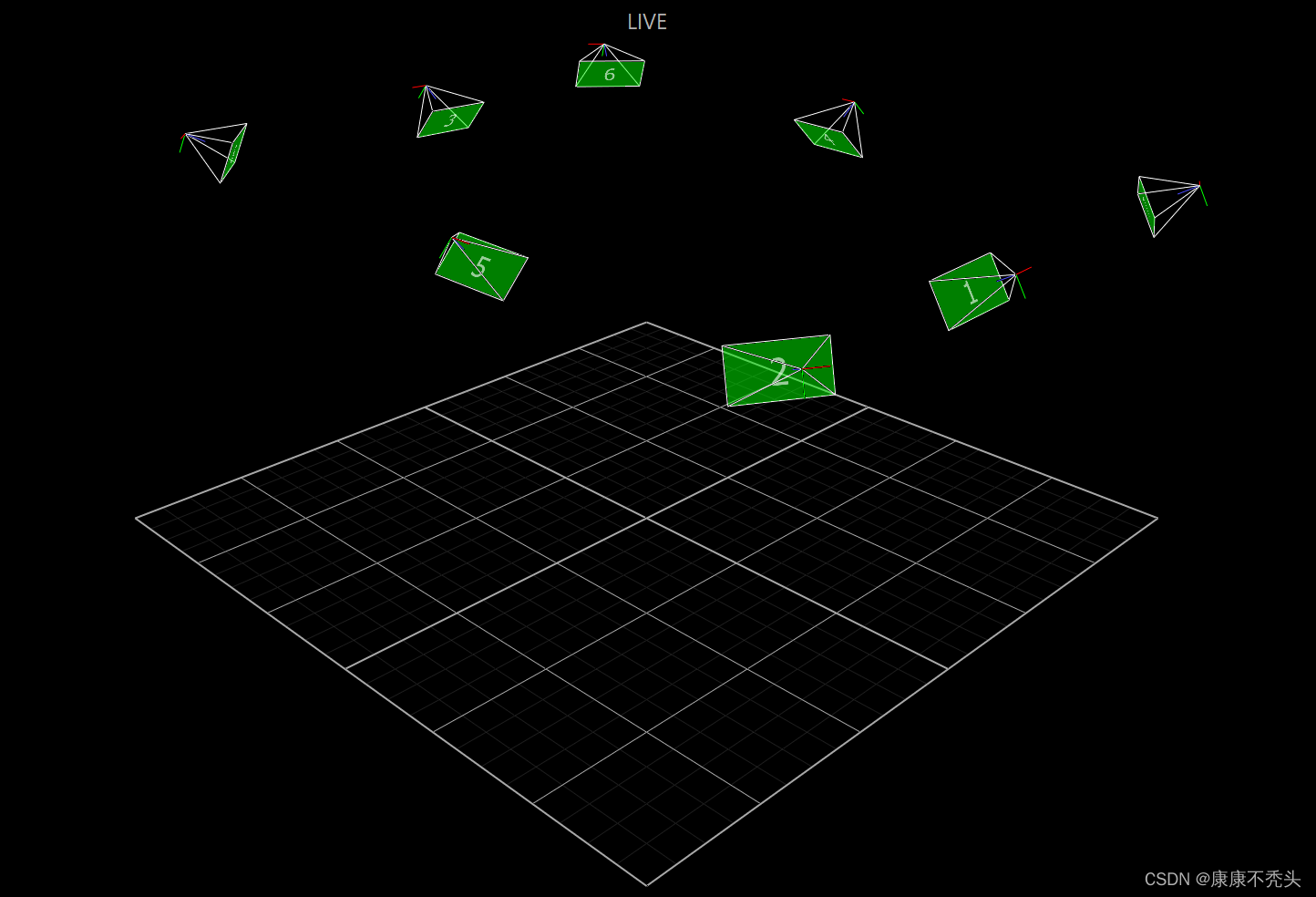
搭建好的环境如图所示。
6.在跟踪物体上粘上Marker小球,一般不少于五个,尽量不要对称。在OBJECTS界面框选出(Alt+左键)Marker小球并Create Object,打开ViconDataStreamSDK就可以看到Vicon发布的目标信息。
三、ROS通信
1.进入ROS工作空间的src文件夹下:
git clone https://github.com/KumarRobotics/motion_capture_system.git2.编译工作空间
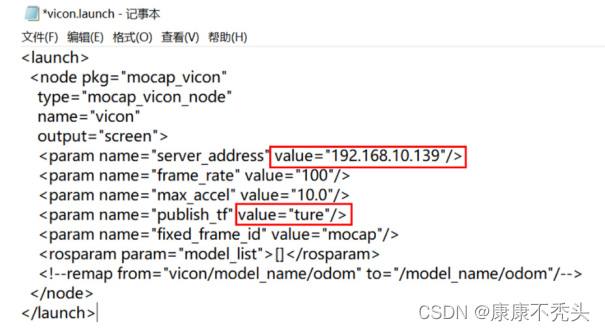
3.进入motion_capture_system/launch文件夹,打开vicon.launch文件,进行两处更改:(1)server_address后的value改成Vicon服务器地址 (2)publish_tf的value改为true;
4.执行 roslaunch mocap_vicon vicon.launch 命令启动 mocap_vicon 节点,可以通过rostopic list和echo查看相关话题。
今天的文章 Vicon使用分享到此就结束了,感谢您的阅读。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
如需转载请保留出处:https://bianchenghao.cn/bian-cheng-ji-chu/102487.html