
力矩是影响物体转动的物理量,力矩计算分两种:
力对固定点的力矩
- 力矩的定义
力对点的力矩定义为在参考坐标系中力的作用点的位置矢量 叉乘 力矢量,用数学公式表示,即:
M ⃗ = r ⃗ × F ⃗ \vec{M}=\vec{r} \times \vec{F} M=r×F
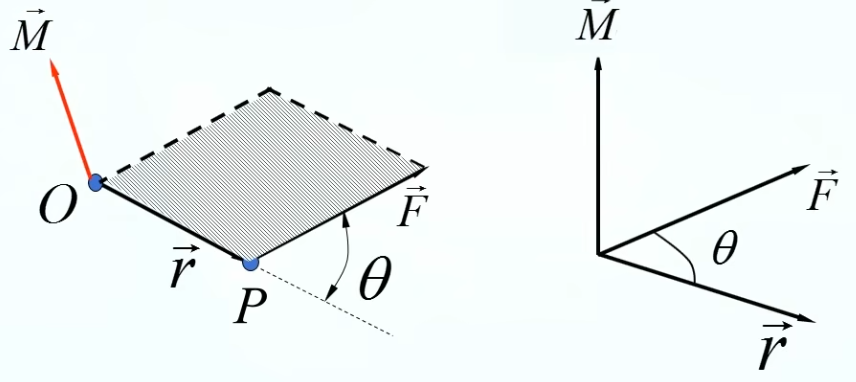
下图形象展示:

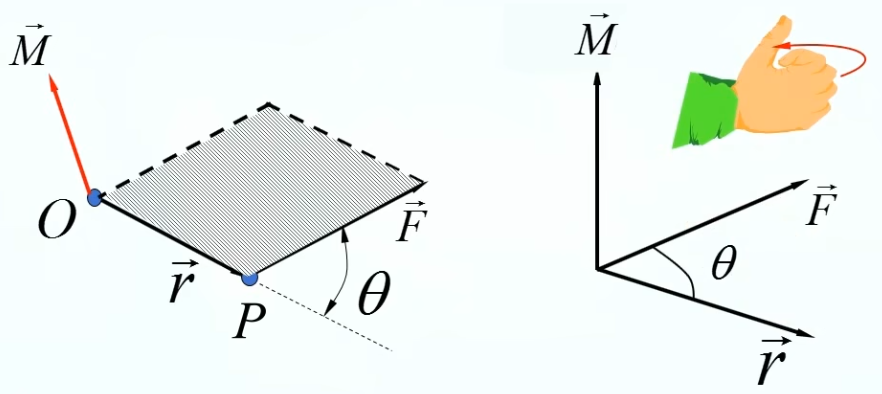
- 力矩的方向
即叉乘的方向,可以用右手定则确定,即:大拇指垂直于四指,四指首先指向位置向量的方向 r ⃗ \vec{r} r 的方向,然后以小于 π \pi π 的角度转向力矢量 F ⃗ \vec{F} F,大拇指的指向即力矩的方向
众所周知,叉乘的两个向量之间位置不能随便变换
力矩的方向垂直于 r ⃗ \vec{r} r 和 F ⃗ \vec{F} F 所组成的平面
- 力矩的大小
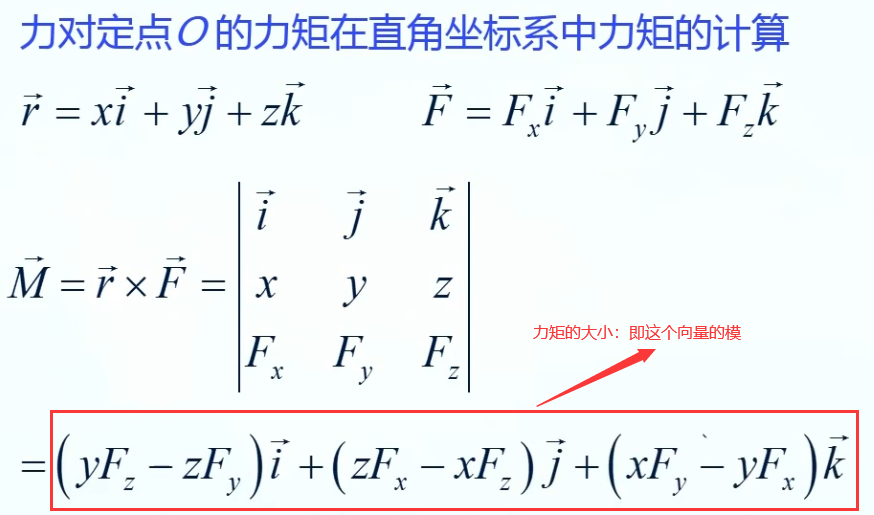
- 计算方法一
既然力矩的计算公式是一个叉乘,那么其大小即 M ⃗ \vec{M} M的模,即有:
- 计算方法二
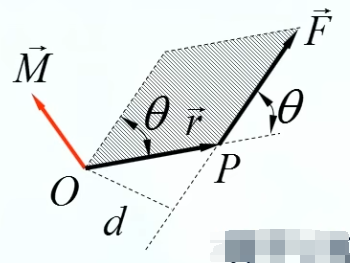
由力矩的定义:力矩的大小等于力和力臂的乘积,力臂即力的作用线到作用点的距离,如下图所示的 d d d:
$$ d=r \cdot sin\theta $$ 所以力矩的大小为 $$ M=F \cdot d=F \cdot r \cdot sin\theta $$
其实 M ⃗ \vec{M} M 的模也可以这样计算
- 计算方法一
- 力矩的方向
 $$ d=r \cdot sin\theta $$ 所以力矩的大小为 $$ M=F \cdot d=F \cdot r \cdot sin\theta $$
$$ d=r \cdot sin\theta $$ 所以力矩的大小为 $$ M=F \cdot d=F \cdot r \cdot sin\theta $$
力对固定轴的力矩
力对某轴的力矩是度量力对该轴转动的效应的物理量,也就是说,力矩的方向会沿着转动轴的方向,所以这里的方向和大小的计算和上面略有不同。
- 力矩的方向和大小说明
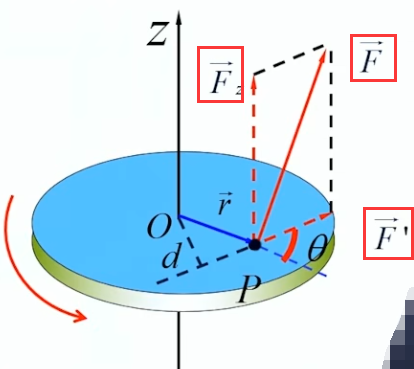
力有一个作用点,该作用点对于转动轴会对应一个平面,转动轴是这个平面的法线。
因此,我们可以将力分解到两个方向,如下图所示:
分解矢量1 F ⃗ z \vec{F}_z Fz 是沿着轴的方向的,它不会产生力矩
分解矢量2 F ⃗ ′ \vec{F}' F′ 在转动平面内,它产生力矩,并可以由上述右手定则验证其方向也是沿着转动轴的方向的
对于分解矢量2 F ⃗ ′ \vec{F}' F′,就和上面力对点的力矩计算方法一样了,其中点即转动轴和平面的交点 O O O
- 力矩大小
M = F ′ ⋅ r ⋅ s i n θ M=F' \cdot r \cdot sin\theta M=F′⋅r⋅sinθ - 力矩方向
M ⃗ = r ⃗ × F ⃗ ′ \vec{M}=\vec{r} \times \vec{F}' M=r×F′ 的方向
- 补充说明
对于三维空间中的转动,可能不只有单独的固定轴,如可能有X-Y-Z三条轴,力对这三条轴的力矩的计算方式和上面所述一样
此外,力的分解方式也不只有上述的形式,可以根据具体需求进行分析
总之,本文描述了最本质的方法。
- 力矩大小
本文主要参考:3.2 力矩 哔哩哔哩 bilibili
今天的文章 力矩的大小、方向及相关说明分享到此就结束了,感谢您的阅读。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
如需转载请保留出处:https://bianchenghao.cn/bian-cheng-ji-chu/84197.html