
本专题由深圳季连AIgraphX李博及团队出品,主要讲解ACC自适应巡航控制系统的开发与仿真测试。具体说来,包括ACC标准/法规分析、系统需求、系统架构、软件需求、软件架构、算法建模、验证场景分析、仿真实验搭建等内容。
自动驾驶的最终目标是将人类驾驶员从繁重的车辆动态驾驶任务中解放出来。虽然这一目标距离我们当下的生活还有一段距离,但现阶段可实现的驾驶模式已然大有不同:无需踩踏油门即可前进,感应到与前车距离过近时还能自动减速等等,这一切都要归功于ACC自适应巡航控制系统的出现。本节将深入剖析ACC系统组成与工作原理,进一步了解它的自适应能力。
1. ACC简介
自适应巡航控制系统 ACC(Adaptive Cruise Control)
1.1 ACC简介
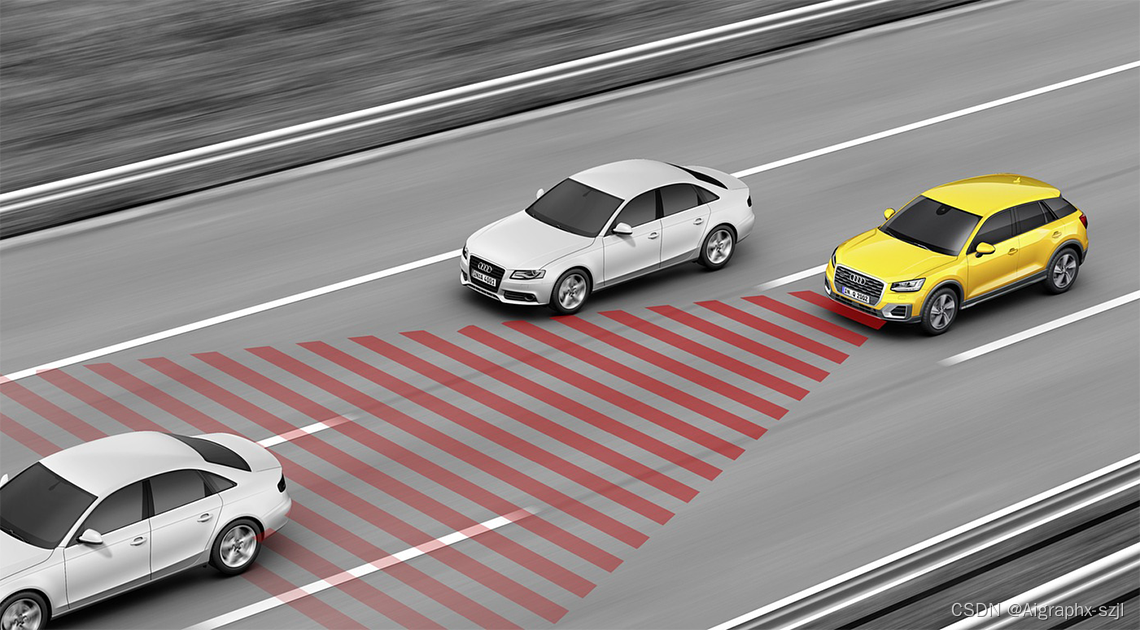
What:ACC是一种舒适性驾驶辅助系统,旨在帮助驾驶员在公路上与前方车辆保持安全距离。
当前市场主流的ACC功能支持的速度范围是0~150kph,根据传感器和车辆性能,也可以支持更高的速度,比如200kph,以满足欧洲客户的需求。
Why:向可能疲惫或分心的司机发出警告和/或进行干预,以改善车辆驾驶安全。
ACC的出现对于CC而言是一种质的飞跃,极大地减轻了驾驶员的负担,在相对复杂的交通环境下,让驾驶员不必进行频繁的功能取消和功能激活动作。
Benefits:减少因疲劳驾驶或分心驾驶造成的事故/伤害/死亡人数通往自主汽车的道路交通流量增加。
How:传感器和电子控制系统在许多情况下比人类司机能更快地对变化的条件作出反应,系统可以是"被动的"(提供声音、视觉或触觉反馈),通知驾驶员即将发生的情况,也可以是"主动的”(干预电机控制或刹车),视情况而定。驾驶员可以选择所需的车速,并设定与前车所要保持的安全距离。可以根据各种行驶状况和个人驾驶风格相应地对这一安全距离进行多档设置。
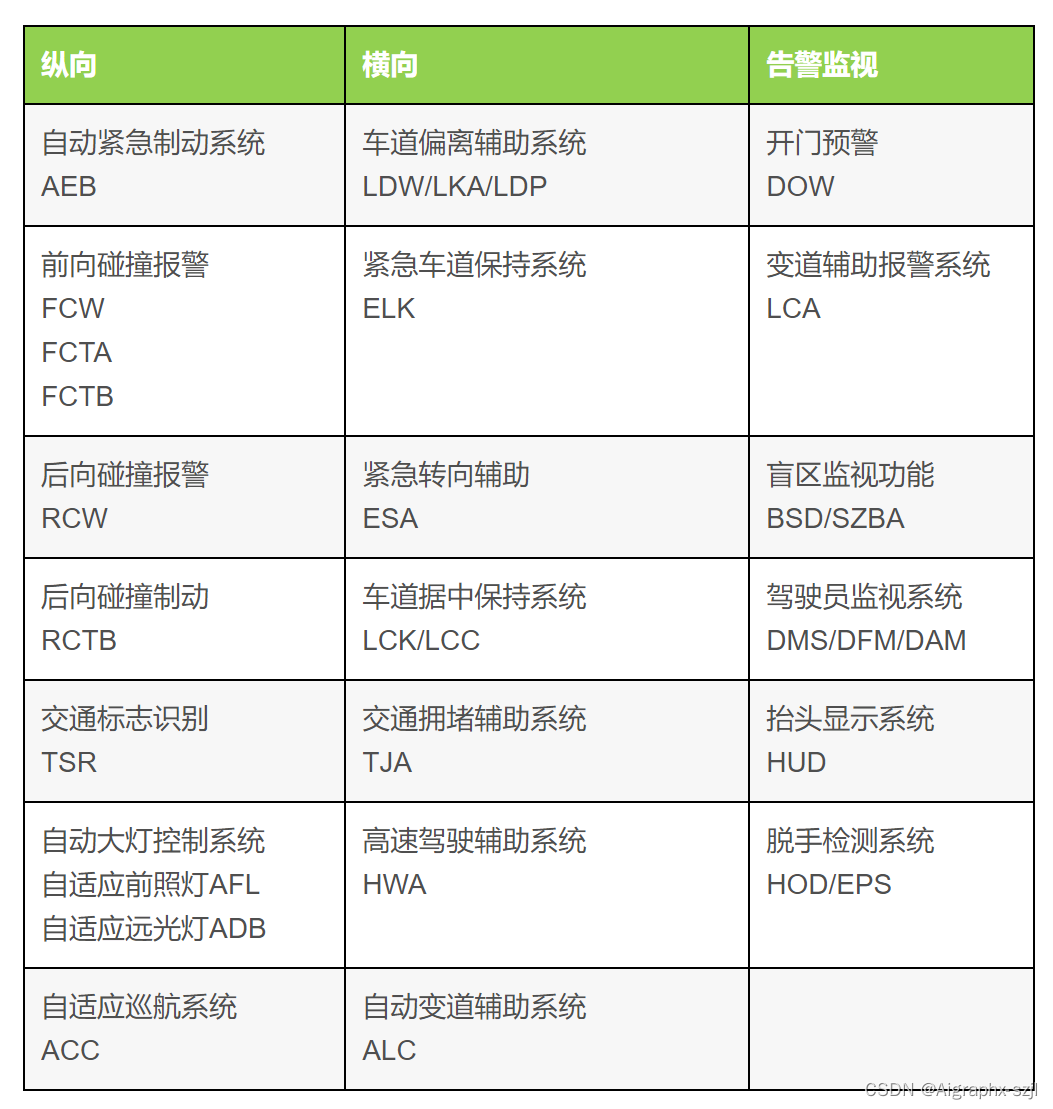
1.2 ADAS高级辅助驾驶系统
1.2.1 纵向
自动紧急制动系统
AEB
FCTB
前向碰撞报警
FCW
FCTA
后向碰撞报警
RCB
RCTB
后向碰撞制动
自适应巡航系统ACC
交通标志识别TSR
自动大灯控制系统
自适应前照灯AFL
自适应远光灯ADB
1.2.2 横向
车道偏离辅助系统LDW/LKA/LDP
紧急车道保持系统ELK
紧急转向辅助ESA
车道据中保持系统LCK/LCC
交通拥堵辅助系统TJA
高速驾驶辅助系统HWA
自动变道辅助系统ALC
1.2.3 告警监视
车门开启预警DOW
变道辅助报警系统LCA
盲区监视功能BSD/SZBA
驾驶员监视系统DMS/DFM/DAM
抬头显示系统HUD
脱手检测系统HOD/EPS
1.2.4 功能清单
1.3 ADS智能驾驶系统
高阶领航辅助驾驶
NOA/NOB
高速公路/交通拥堵自动驾驶
HWP/TJP
自主代客泊车
AVP
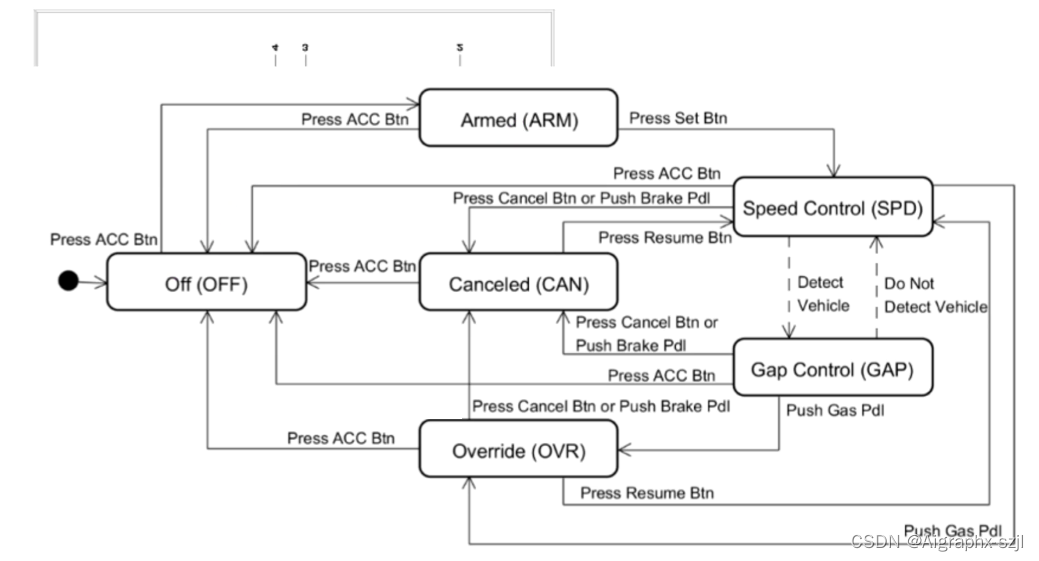
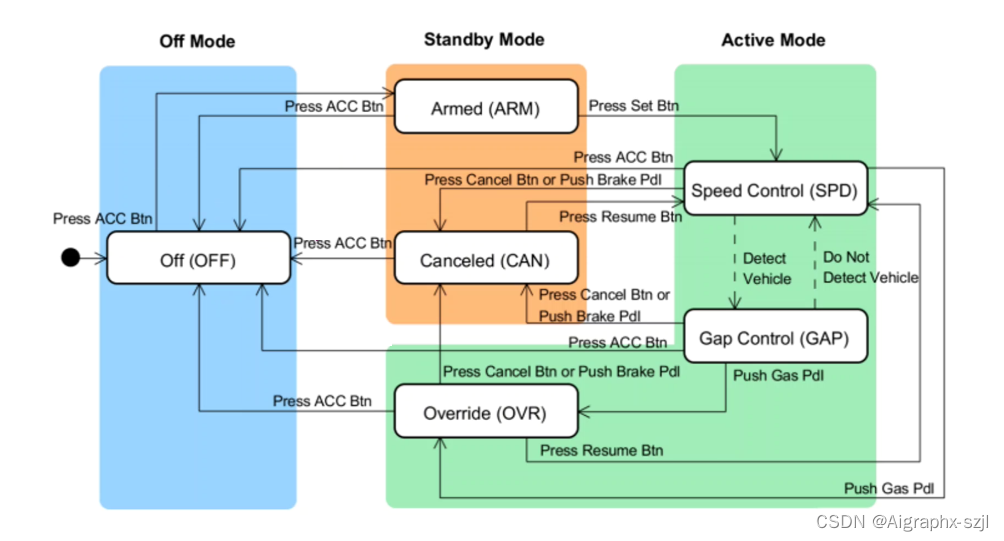
1.4 ACC工作模式
1.4.1 ACC工作模式
ACC按照ISO15622标准,主要分为LSRA、FSRA,适合场景如下:
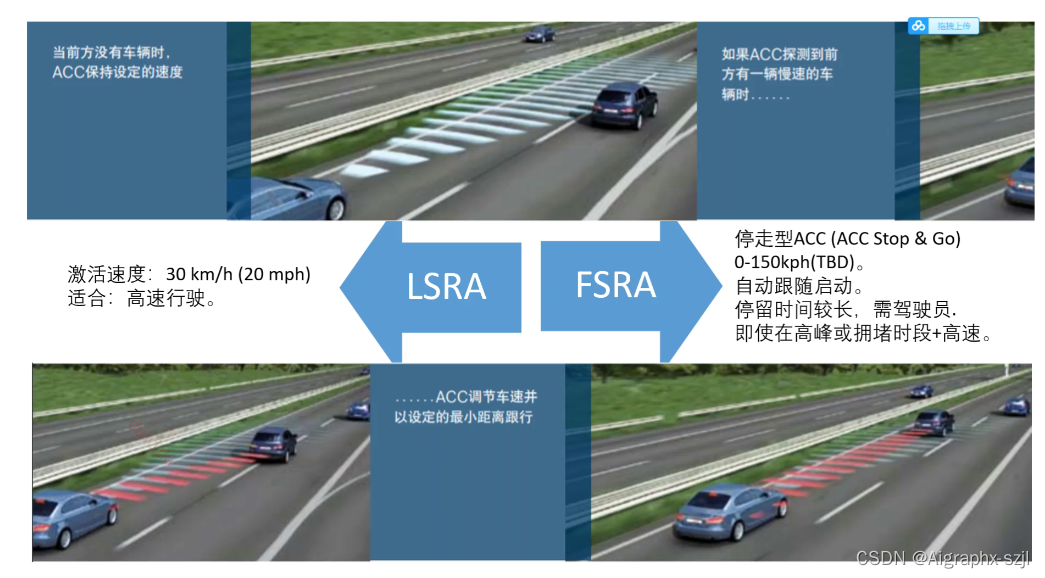
日常生活中,我们常说ACC工作在定速控制和跟车控制两种模式中。其中跟车巡航控制根据行程工况的不同,分为:
- 稳态跟车
- 前车急减速
- 前车急加速
- 旁车切入
- 前车切出
- 远处接近前车
- 主动避撞
备注:两种模式切换时需要平滑过渡。
1.4.2 ACC与其他驾驶功能
随着技术的发展,ACC功能在不断扩展之中,譬如:
- ACC与LKA相结合
- ACC与AEB相结合
- ACC与LCA相结合
这突破了传统ACC仅纵向跟车的功能局限,进一步实现汽车辅助安全驾驶。
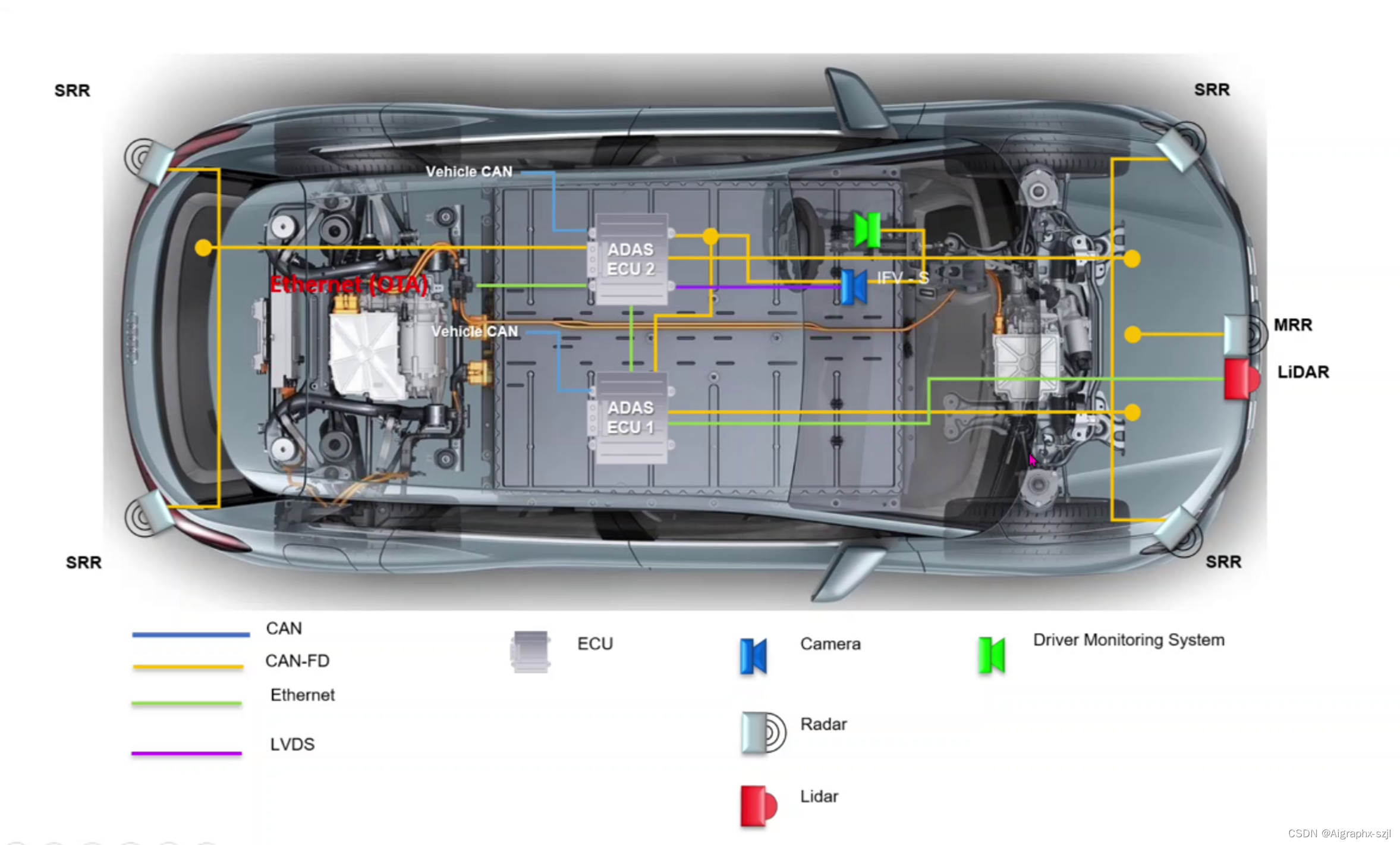
2. ACC系统组成
2.1 经典ADAS/ADS系统组成
- 域控制器Controller
- EMS/VCU
- ESC
- BCM
- 传感器
- 超声波雷达
- 激光雷达
- 毫米波雷达
- MRR/LRR
- SRR
- 摄像头
- 北斗GPS/IMU(轮速、横摆角速度、转角)
- HMI
- Off
- Stand-by
- Fault
- On
- Cancel
- H-Map
- HOD
- DMS
- 双闪灯
- 系统冗余
- ......
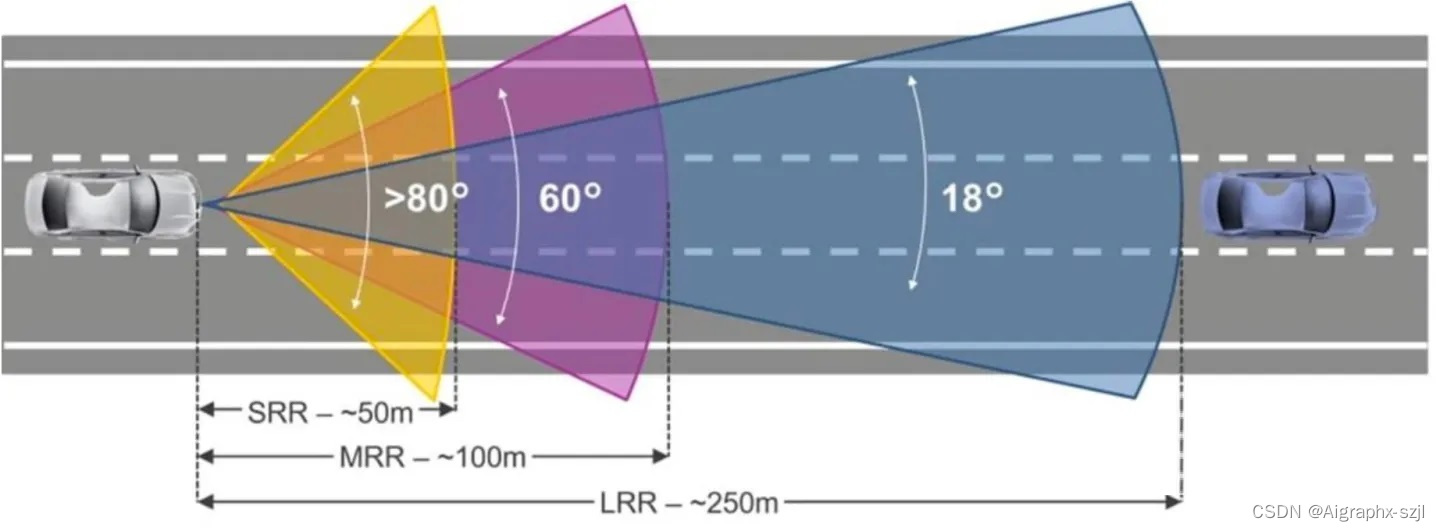
2.2 毫米波雷达
2.2.1 四类毫米波雷达
按探测距离来划分,毫米波雷达主要分为四类:超短程毫米波雷达USRR、短程雷达SRR、中程雷达MRR和远程雷达LRR,最大探测距离分别在 15 米、50 米、150 米和250 米。
- LRR一般装在前方和后方,实现 ACC/AEB/LDW 功能。
- MRR 装在车身四角,实现 BSD/变道辅助功能。
- SRR装在车身周围,实现停车辅助、十字交通报警。
- SRR/MRR/LRR都存在近距离盲区所以需要超声波雷达来弥补,而 USRR 和超声波雷达功能类似。
2.2.2 车载角雷达、前雷达
按照车载安装位置划分,毫米波雷达可以分为角雷达和前雷达。
- 角雷达:安装在车辆后部和前部两侧,一般用 SRR 作为角雷达,前角雷达主要实现横穿车辆预警、行人和自行车识别,后角雷达主要实现 BSD、变道辅助功能。
- 前雷达:安装在车辆格栅和前保险杠上,一般用 MRR/LRR作为前雷达;前雷达主要实现 ACC 和 AEB 功能。
2.3 摄像头(以特斯拉为例)
随着Model 3和Model Y以及进化到2021年重新设计的Model S和Model X,所有这些车型现在都配备了九个摄像头。快进到2023年,一些车型现在配备了硬件4.0(HW4),有八个更高分辨率的摄像头,并将前置摄像头减少到两个。
2.3.1 前置摄像头

前面的摄像头位于挡风玻璃的顶部。它们由一个带有典型镜头的摄像头、一个广角镜头和一个长焦镜头组成。 据特斯拉称,长焦镜头可以看到前方250米,是高速自动驾驶的理想选择,而主镜头覆盖150米。此外,广角镜头提供了一个类似于全景的视角,用于在复杂的十字路口和狭窄的弯道上进行导航。
2.3.2 后视摄像头
后视摄像头位于车牌上方。它可以提供车辆后面50米的视野,协助停车、倒车和倒车自动紧急制动。
2.3.3 挡板摄像头
特斯拉汽车的每个挡板上都有一个摄像头,以大约45°的角度指向车辆的后方。这使车辆能够看到其侧面的车辆,并帮助监测车辆的盲点。
当使用特斯拉的盲点监控功能时,司机也可以看到这些摄像头,或者在倒车时启用侧面摄像头,显示倒车摄像头画面,以及挡泥板或 “中继器 “摄像头。
2.3.4 B柱摄像头
特斯拉汽车还包括另外两个位于B柱上的侧摄像头。这些摄像头不像中继器摄像头那样向后瞄准,而是瞄准车辆的前方。这使它们能够捕捉到车辆前半部分的区域。这些摄像头有助于交叉口、停车和其他方面。不幸的是,这些摄像头的视频只能在车辆停放时查看,并通过进入控制>服务并点击 “预览摄像头”。
2.3.5 机舱摄像头
目前所有特斯拉车型都包括一个机舱摄像头。该摄像头位于后视镜上方,监测驾驶员的注意力,特别是在使用自动驾驶时。你可以通过导航到 “控制”>”服务”>”预览机舱摄像头 “来查看屏幕上的机舱摄像头。如果启用了哨兵模式,并且您所在地区有哨兵模式实时访问功能,您还可以通过特斯拉应用程序查看。
备注:特斯拉比较注重隐私保护,其公司技术文档介绍。咱们AIgraphX在隐私保护、人工智能安全方面也在长期跟踪,在同态、同调以及同伦理论的基础研究方面有一定积累。
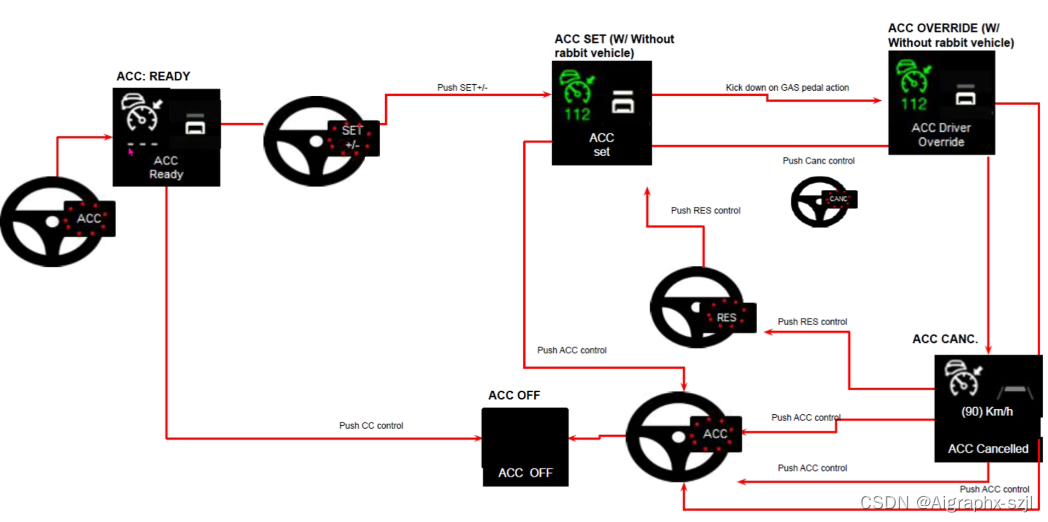
2.4 HMI人机交互
人机交互系统已经进化到通过软件UI界面实现,以下是通过按键来实现方式。
On/off
ENGAGE
STAND-BY
CANCEL
Fault


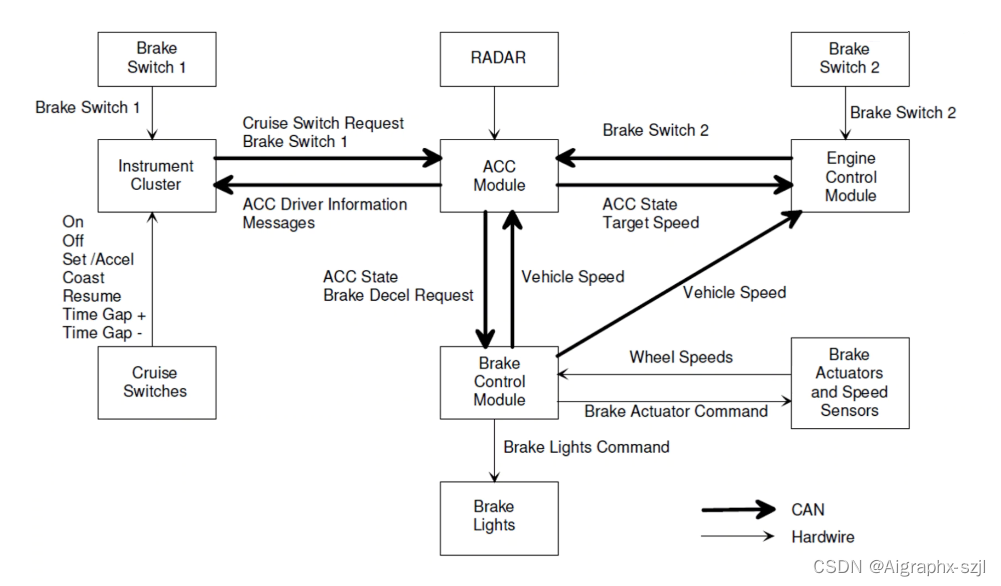
2.5 ACC控制器
同样作为ADAS纵向控制功能, AEB和ACC通常共用一套传感器和控制器硬件。当前主流车型,两项功能的算法及软件系统一般部署在AD智驾域控制器上,特斯拉已经发展到HW4.0。
由于ACC除了进行制动控制外,还需进行加速控制,因此ACC相对于AEB在执行器层面增加了EMS和TCU/VCU。
当前主流系统方案中,ACC的纵向控制功能(包含制动控制及加速控制)一般由ESC控制器承担。ACC仅作为上位机输出纵向控制请求,由ESC控制器负责对各驱动、制动控制器进行统一管理。
工作流程:ACC控制器 —> ESC控制器 —> 制动器/VCU。
3. ACC工作原理
ACC工作原理是利用Radra/IMU/Camera等感器监控车辆前方的交通状况,包括前车的距离、方位和相对速度。当车辆前方畅通无阻时,ACC自适应巡航系统将保持所设置的期望速度。如果系统检测到本车正在向前方车辆靠近,ACC将通过发动机控制器或ESP控制器对车辆进行配合干预,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。当前方车辆再次畅通行驶时,ACC将使车辆加速至预先设定的期望速度。
这种系统可以在车速高达160km/h的情况下进行辅助驾驶。(欧美标准)
3.1 ACC控制系统原理图
3.1.1 ACC原理图
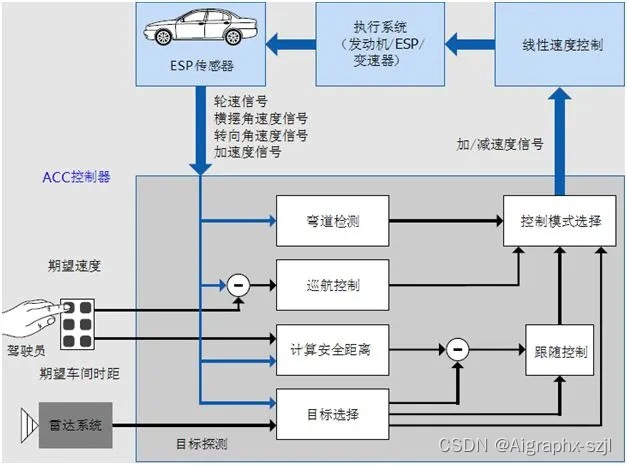
- 引入雷达和摄像头,两者选其一或融合感知来实现对车辆前方行驶区域的感知,测量本车前方车辆的运动属性(方位、横向速度、纵向速度、运动状态等),筛选出对本车行进方向上合理的跟随目标(合法的机动车道路参与者:汽车,摩托车等)。
- 需要车辆的制动系统(ESC)和驱动系统(Powertrain)响应ACC系统发出的控制指令。
- 需要整车HMI系统获取驾驶员的操作意图(ACC系统开启、ACC系统关闭、ACC系统恢复、加速/减速设定、跟车距离设定等)。
- 需要整车HMI系统显示ACC系统的状态信息及目标跟随信息等。
- 需要引入ACC车辆的运动状态信息(偏航率,车速,方向盘转角等)用来实现ACC系统对自车运动状态及运动趋势的评估。
以驾驶员跟随控制为例:模型输出安全跟车所需期望加/减速度,通过节气门和制动器的切换控制,使得车辆的实际加/减速度能够追踪实现期望的加/减速度。
3.1.2 ACC巡航控制、跟随控制
巡航控制和跟随控制时ACC系统两种重要功能。
巡航控制(定速巡航和跟车巡航)是自动驾驶辅助系统,它允许车辆在高速公路上自动驾驶。定速巡航功能是在前方无车辆或前方车辆状态对本车车速控制无影响时,保持驾驶员设定的车速行驶,可以减轻驾驶员负担,保障行车安全。而跟车巡航则是在前方车辆状态对本车车速控制有影响时,可以跟随前车加速或减速并使本车可以根据驾驶员设定的车间距离自动保持与前方车辆之间的相对距离。
跟随控制则是指车辆通过传感器(如雷达、摄像头等)感知前方道路的目标信息,进而自动发出指令来控制车辆的功能。在跟随控制下,车辆会通过车距传感器实时监测前方车辆的距离和速度。当前方车辆减速或停车时,车辆会通过自动控制系统自动减速,并保持与前方车辆的安全距离。如果前方车辆驶离,车辆将自动跟随前车驶离。
3.1.3 ACC距离控制和速度控制
在ACC系统中,距离控制和速度控制是两个核心功能。
距离控制:通过车辆间距传感器等传感器监测前方车辆的位置和速度,并根据预设的车辆间距设置,自动控制车辆速度,以保持与前车安全的距离。常用的传感器包括雷达和激光雷达(Lidar)。雷达传感器可以发射电磁波,并利用反射回来的波探测目标的距离、方向和速度。激光雷达则使用激光束扫描目标,通过测量激光束从发射到返回的时间来计算距离。
速度控制:根据前方车辆的速度变化,ACC可以自动加速或减速,以保持设定的车辆间距,确保与前车的安全行驶距离。一般情况下,当检测到前方车辆减速时,ACC会自动降低本车速度以保持安全距离。而当检测到前方车辆加速时,ACC则会相应地提高本车速度以保持设定的车辆间距。
此外,在停车和重新启动方面,ACC也可以提供便利的停车和出发体验。在低速行驶或停车状态下,ACC可以根据前车的行驶情况,自动控制车辆的停车和重新启动。
巡航控制、跟随控制与距离控制、速度控制在ACC自适应巡航系统中是相互关联但不同的概念。
巡航控制和跟随控制是更宏观的概念,它们通常涉及到的是整个车队的控制和协调,包括对车辆的集中管理和调度等。在这个层面上,巡航控制系统主要负责设定和调整车辆的行驶速度,使之保持在一个设定的范围内,而跟随控制系统则负责让车辆在队列中保持适当的距离和位置。
相比之下,距离控制和速度控制更多地涉及到的是单车或者少量的车辆。在ACC自适应巡航系统中,距离控制和速度控制是核心的功能。例如,ACC可以通过自动调整本车速度,保持与前车恒定的距离,当前车速度发生变化时,ACC也会相应地调整本车速度以保持设定的距离。此外,当本车与前车的距离过近或者存在潜在碰撞危险时,ACC也可以通过发出警告或者采取主动刹车等措施来避免碰撞。
总的来说,巡航控制和跟随控制更偏向于对整个车队的管理和协调,而距离控制和速度控制更偏向于单车或者少量的车辆的行驶辅助。
需要注意的是,自动驾驶辅助系统在任何情况下都不能完全替代驾驶员的操作,驾驶员在行驶过程中仍需保持警觉并进行必要的安全操作。
3.2 目标识别
ACC目标识别的主要任务包括两个:障碍物检测及对于目标的车距、相对速度、方位角等信息的探测。
- 相对速度探测
- 标准ACC直道车距探测
- 标准ACC横向探测范围
- 全速ACC直道车距探测
- 全速ACC功能的横向探测范围
需遵循ISO 15622规范要求设计。
19-2 ACC GB/T 20608与ISO15622法规对比分析_Aigraphx-szjl的博客-CSDN博客
3.3 目标选择
专门另起一节介绍。
3.4 跟随控制
目标车辆被选出后,就能在距离和相对速度的基础上算出应该采用的加速度。需要的距离可由驾驶速度和驾驶员设定的时距算出。
3.5 目标丢失策略和弯道控制
如果传感器的FOV不够大,弯道行驶时可能会发生丢失目标的情况,即使在直行时,如目标反射率较小(摩托车等)或无法分离物体时,也不排除丢失目标的可能性。
3.6 性能要求
需遵循ISO 15622规范要求设计。
另外对执行器性能要求,在 19-6 节专门介绍。
4. ACC应用拓展与探讨
4.1 ACC应用拓展
除了前文介绍的ACC功能外,对ACC的扩展还包括了以下几个功能:
- iACC – Intelligent ACC,其主要特点为可以根据地图(导航地图或高精地图)或摄像头TSR(Traffic Sign Recognition)提供的当前道路最高限速,当其所提供的最高限速与驾驶员设定车速不同时,提示或自动使用系统推荐的最高限速作为设定车速。
- Smart ACC – 其主要特点为可根据地图(ADAS地图或高精地图)或摄像头车道检测提供的当前道路曲率,推算出当前舒适的过弯速度。当ACC当前速度或目标速度大于此系统推荐过弯速度时,自动使用系统推荐的过弯速度作为设定车速,保证安全平稳过弯。
- PCC – Predictive Cruise Control, 商用车上所使用的预见性ACC,其主要特点为根据GNSS提供的位置信息与数据库中的地图道路信息进行匹配,由数据库提供通过此道路的最佳速度,由系统使用此最佳速度作为ACC设定车速。
- Overtaking-Boost超车辅助功能,在车辆准备超车时,ACC暂时自动缩短时间距,通过缩短时间距增大车辆加速度,帮助驾驶员进行超车。
4.2 ACC一些不足
从官方的各种宣传来看,ACC并不能保证在所有的道路情况下都有效,您仍然要负责保持合适的车距和车速,并在可能发生危险时进行干预。
- 每人驾驶习惯不同,ACC在高速使用时,由于境况不同,敏感程度也会不同,在雷达沾惹污物时可能会影响行车安全,在加速减速时,可能会产生有不适感,在瞬时油耗会加大。
- 当你快速行驶超越旁边车道车辆时,假如前方车辆突然变道,自适应巡航可能反应不及而撞上。
- 自适应巡航系统容易让驾驶者降低警惕,脚不在踏板位置会加长反应时间。
- 由于ACC雷达一般都是中距雷达,检测区域是有限的,再加上雷达相对位置固定,检测角度和方向相对不变,因此,某些情况下,对于前方车辆的检测存在盲区,ACC无法有效识别目标,存在碰撞的风险,而在有些情况下,ACC则存在误识别,造成不必要的减速。
以上功能在实践中,有的效果往往受限于地图附带信息的及时性,GNSS定位的准确性,摄像头对限速标志识别的准确性等条件,实际效果并不明显。从解决方案看,辅助以智慧路V2X也许是最优解。综合而言,为拓展ACC的适用场景,需要进一步通过传感器或者融合感知技术,全面提升整车的感知能力。
- 长距离高分辨率的毫米波前雷达或高分辨率摄像头以提高针对小障碍物的检测性能。
- 高分辨率角雷达以更早的识别近距离切入的车辆。
- V2X对于交通流和道路环境的感知。
- 异构传感器前融合以避免信息丢失从而对目标进行更加准确的识别。
- 端到端自动驾驶大模型AutoGPT的运用。
4.3 实车/仿真测试效果
在高速或者快速路上行驶,极大地减轻了驾驶员的负担。

试驾时,在相对复杂环境,也能正常跟车巡航,自动启停,几乎不用踩制动板。

试驾时,需要驾驶员接管的次数并不多。

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
如需转载请保留出处:https://bianchenghao.cn/bian-cheng-ji-chu/87431.html