
投影学
题解:本文命名《投影学》,是由于本文讨论投影的一些最基础的问题。
1 投影法
1.1投影的基本概念
投影,是一种通过降维的方法在平面上表示空间形体的办法。 在工程上,投影是一种光线照射下形体在地面或墙面上产生影子的模拟和抽象,通过形体轮廓点的一系列投射线与投影面交点的集合。19 世纪发展出投影几何(projective geometry ),是以综合法得到一些定性的关系,由此图示和图解空间形体。它是画法几何学的基础。 通过物体的投射线向选定的面投射且在该面上得到图形的方法叫投影法,它研究空间形体与其投影之间关系。根据投影法所得到的图形叫投影。 学习和掌握投影理论是实现空间到平面,以及平面到空间双向思维的过程。 投影的基本要素是:形体、投射线和投影平面。 工程图常用的投影方法有以下四种:多面正投影法、轴测投影法、透视投影法和标高投影法。 从投射线性质讲,分为中心投影(透视)和平行投影(正投影、轴测投影和标高投影)。 从平行投影角度,有正投影和斜投影。 正投影和标高投影可视作“精准”投影。这里的“精准”按不同的要求衡量。 轴测投影和透视投影可视作“视觉”投影。可以说仅用于“视觉”传递。1.2空间表示
形体是空间的,图纸是平面的,在平面上表示一个空间形体是通过投影方法实现的,这是一种降维的表述。降维表述就会有信息缺失,因此,设法补充缺失的信息是降维方法的主要工作。 如笛卡尔直角坐标系一样,空间形体有三个独立的维度去描述,日常所说立方体的“长、宽、高”就是互相垂直的三个度量维度。正投影中用三个视图分别表示形体的三个方向(面),轴测图用一个视图同时表示三直三面角,他们的目标都是要表达形体的三个方向(面),表达形体独立的三个维度。 本文将分析正投影法、轴测投影法、透视投影法和标高投影法各自采取的空间表示策略。2 正投影法
2.1为何三视图
空间形体是三维的,在平面上用三个视图分别去表达三个维度(尺寸)是很自然的想法。但细究起来,并非那么简单。 形体,都是在笛卡尔坐标系下表达的,看一下形体的构造规则: 两点决定一直线段- 有序封闭直线段决定一个平面。由此,点是决定空间形体的基础。 直线,两个点能唯一确定一直线段。点决定了,直线段也就决定了。 平面,由围成的直线确定。同样,组成平面边界的有序直线段一旦确定,平面也就确定了。 点,可表达成P(x,y,z) ,一旦x 、y 、z 确定,点就唯一确定了。投影是降维,从三维空间降为二维平面,所以,从理论上讲,点只需在两个垂直投影面上上的投影就能唯一决定一个点。例如H 面投影确定了x,y ,Z 面投影可确定z,x ,因此两个面的投影,P(x,y,z) 就可确定。 按照这个说法,理论上两个投影面就能表述空间形体了。那么,为什么一定要用三视图呢? 考察图2-1 的情况,同时与H 面和V 面垂直的长方形面及三角形面,由于投影的积聚性造成空间不同面在同一投影面上产生相同的投影。在这种情况下,仅靠H 面和V 面上的投影,不能确定空间是长方形面或三角形面,甚至是其他的多边形。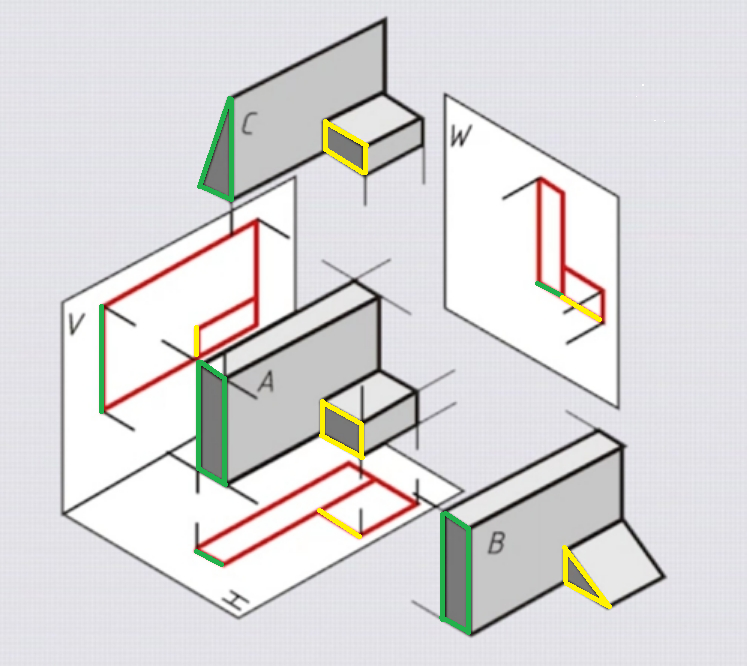 图2-1 投影的积聚性造成空间不同面在同一投影面上产生相同的投影 图2-1 投影的积聚性造成空间不同面在同一投影面上产生相同的投影 |
2.2 投影体系
画法几何投影体系用三个互相垂直的空间平面,并将空间分成8 个部分,称为8 个分角。我国制图国家标准(GB/T14692-2008 和GB/T13361-2012 )规定采用第一分角作为投影体系(图2-2 )。第一分角投影体系正立的投影面简称为正面,用V 标记;侧立的投影面简称为侧面,用W 标记;将水平放置的投影面称为水平面,用H 标记。H 、V 和W3 个面两两互相垂直,其交线OX 、OY 和OZ 为投影轴,如果在OX 、OY 和OZ 三投影轴标出尺寸,那么三投影面体系就可构成一个空间直角坐标系,三个投影轴相当于三个坐标轴,三轴交点O 称为原点。 第一分角投影体系简称E 法,俄、英、德、法均采用E 法,而美、日、加拿大和澳大利亚等则采用第三分角投影体系,简称A 法。第三角画法的俯、仰、左、右视图靠近主视图的一边(里边),均表示物体的前面,远离近主视图的一边(外边),均表示物体的后面,与第一角画法的“外前,里后”正好相反(图2-3 )。从外前、里后对应的角度讲,似乎A 法更合乎人的感觉。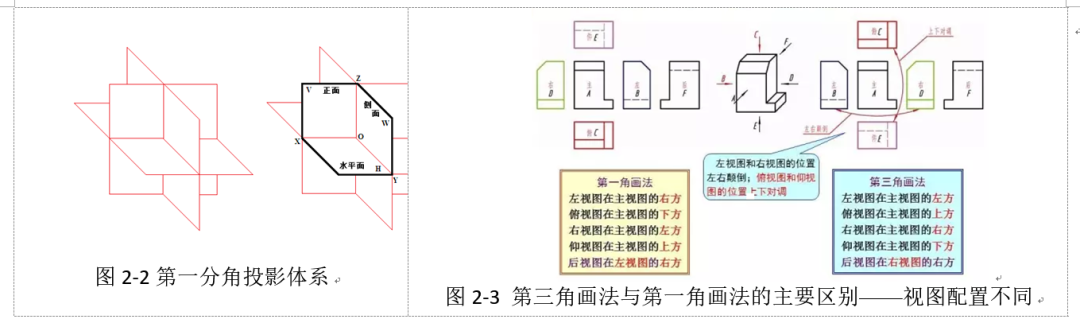 不管采用第一分角还是第三分角,以三面投影体系为主构筑正投影体系,在平面上表示空间物体就是正投影体系,在这三个正投影面上投影可从三个角度分别准确反映形体的形状和大小。
不管采用第一分角还是第三分角,以三面投影体系为主构筑正投影体系,在平面上表示空间物体就是正投影体系,在这三个正投影面上投影可从三个角度分别准确反映形体的形状和大小。
2.3 换面法
通过选择新的投影面,使空间形体的投影达到某一特殊要求的改变投影面方法叫做换面法。 例如,通过换面法求得空间直线段的实长。 当空间直线段与投影面不平行时,它在投影面上的投影将不反应空间线段的实长。如图2-4中AB与V面不平行,ABb'a'将成一个直角梯形,a'b'与AB的实长不相等。如果换一个同样与H面垂直,而与AB平行的V 1面,那么,AB在V 1面的正投影a 1'b 1'反应了AB的实长。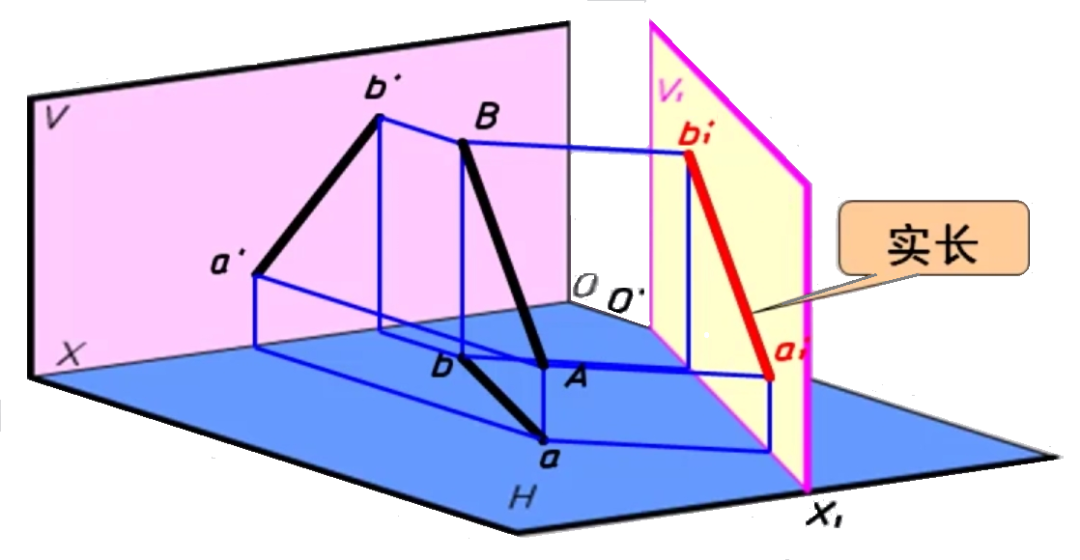 图2-4 换面法 图2-4 换面法 |
3 轴测投影法
3.1解析单面投影
前面说明了正投影法描述空间形体用三个视图的缘由,轴测投影法是用单面视图描述空间形体。同样,根据描述形体三个维度的基本点,单面投影需要在一个投影面上表述出三个维度。 立方体的一个角可以作为参考系。 立方体八个角中的一个角,它由互相垂直的三个面(三直三面角)构成,代表三个维度。因此,如果一个单面投影图能将一个立方体及他的一个角的空间感觉表达清楚了,那么就能将一个空间形体表达清楚了,就接近于人们的视觉习惯,形象、逼真,富有立体感。因此可以用简单的立方体作为样板或参考系。等轴测投影法就是根据从立方体一条对角线作为投射线方向引入的。 空间坐标系也可以作为一个参考系。 空间坐标系与立方体的一个角一样,也是一个三直三面角,而且,更能定量表述形体的尺寸。因此,将空间坐标系作为参考系,是一个更佳的选择。将空间坐标系和轴测坐标系之间的对应和转换关系搞清楚了,轴测投影体系也就搞清楚了。当然,从几何的不变性,形体以及在平面上表述形体的正视图、轴测图等并不依赖于坐标系。 目前的轴测投影是因“ 立方体的一个角可以作为参考系”启发下,以“ 空间坐标系作为一个参考系 ”实现的。 最早的轴测投影画法出现在英国,它的奠基人是Wiliam Farish ,威康• 费利什(1759-1837 ),1820 年,他在英国哲学学会会刊上发表了题为“论等测透视图(On Isometrical Perspective )”的论文,明确提出了表现力较好的立方体的一个面投影表示法:“ 从立方体一条对角线上的无穷远点,向一个垂直于该对角线的平面投影 ”,这构成了等轴测投影法。这个设想的扩展便构成了后来的轴测投影法,它建立在向空间平面作平行投影的基础上,建立了空间坐标系、投射方向、投影面三者之间的几何关系,构成了轴测投影体系。3.2 轴测投影体系
1)轴测投影的基本定理
德国几何学家K• 波克证明了波克定理:“ 平面上从一个点引出的任意3条(不共线的)线段,总可以作为空间3条互相垂直的相等线段的平行投影。 ”波克定理被称为轴测投影的基本定理,它不仅奠定了轴测投影的理论基础,而且定性地描述了轴测投影中各参数之间的互相关系:投影平面上轴测轴的各种位置(轴间角)和轴测单位的各种长度(轴向伸缩系数)是与空间坐标轴的各种位置和投射方向相对应的。当任意选定了轴向伸缩系数的比值和轴间角以后,总能求出空间坐标轴的位置和相应的投射方向。2)平行投影体系
轴测投影建立在一个平行投影体系上。 平行投影体系。设在空间坐标系下表述的一个平面Π ,一个方向L 和任意一点A 。如果通过A 点引一条与方向L 平行的直线使它与平面Π 相交,则交点a 就叫做A 点沿L 方向的平行投影。直线Aa 叫做投射线,平面Π叫做投影面。如果投影方向L 与投影面Π垂直,这种投影就叫做正投影,否则叫做斜投影。由空间坐标系、投影面和投射方向构成的一组素叫做平行投影系,它表达空间坐标系、投射方向、投影面三者之间的几何关系。3)轴测投影的表述
轴测投影的完整表述: 在一空间笛卡尔坐标系下有一投影平面和一投射方向构成一个平行投影系,轴测投影是在这个平行投影系下,将一个空间直角坐标系(三维坐标系)沿投射方向投射到投影面上,构成轴测坐标系,用以在一个平面上表达三直三面角(平面上表达的空间坐标系)。 因此,简单的说,轴测投影就是: 用平行投影的方法,将一空间坐标系向设定的投影面投影,构成投影面上的轴测坐标系。在这个轴测坐标系下表示的有立体感的图形叫做原空间形体的轴测图。4)轴测投影三角形
Oxyz 的三个坐标轴与Π 的交点A 、B 、C 构成一个三角形△ABC ,称为“轴测投影三角形”,△ABC 是投影面Π 与空间笛卡尔坐标系三个轴相交的交点形成的三角形,它与三直三面角的空间坐标系的三个坐标面构成一个四面角O-ABC 。 这个△ABC 在轴测投影理论与应用的研究中有特别的意义。以后关于轴测投影的研究基本上是基于这个轴测投影三角形展开的。3.3 轴测投影的原理图
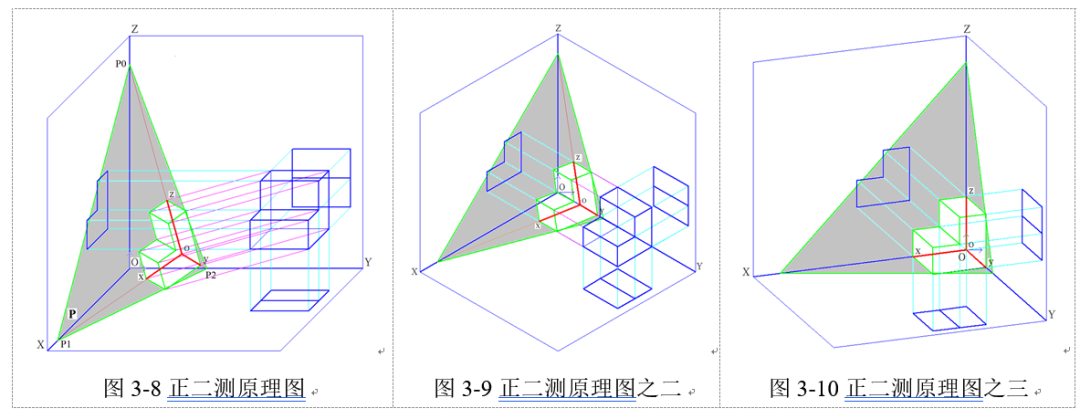
如图3-1 ‐图3-4 所示,空间笛卡尔坐标系Oxyz ,投影平面Π ,投射线L (图3-1 ‐图3-2 投射线L 同 OO 1 ),三坐标轴Ox,Oy,Oz 与Π 的交点分别为A 、B 、C 。 在投影面Π 上,空间坐标系原点O 在Π 上的投影为O 1 ,空间三坐标轴(Ox,Oy,Oz )在Π 面上的三投影(O 1x 1,O 1y 1,O 1z 1 )构成轴测坐标轴,三者以O 1 为原点,构成轴测坐标系。 若L ⊥Π ,构成正轴测投影(图3-1 ‐图3-2 ,投射线L 与OO 1 重叠); 否则,构成斜轴测投影(图3-3 ‐图3-4 ,OO 1//L ,OO * ⊥Π )。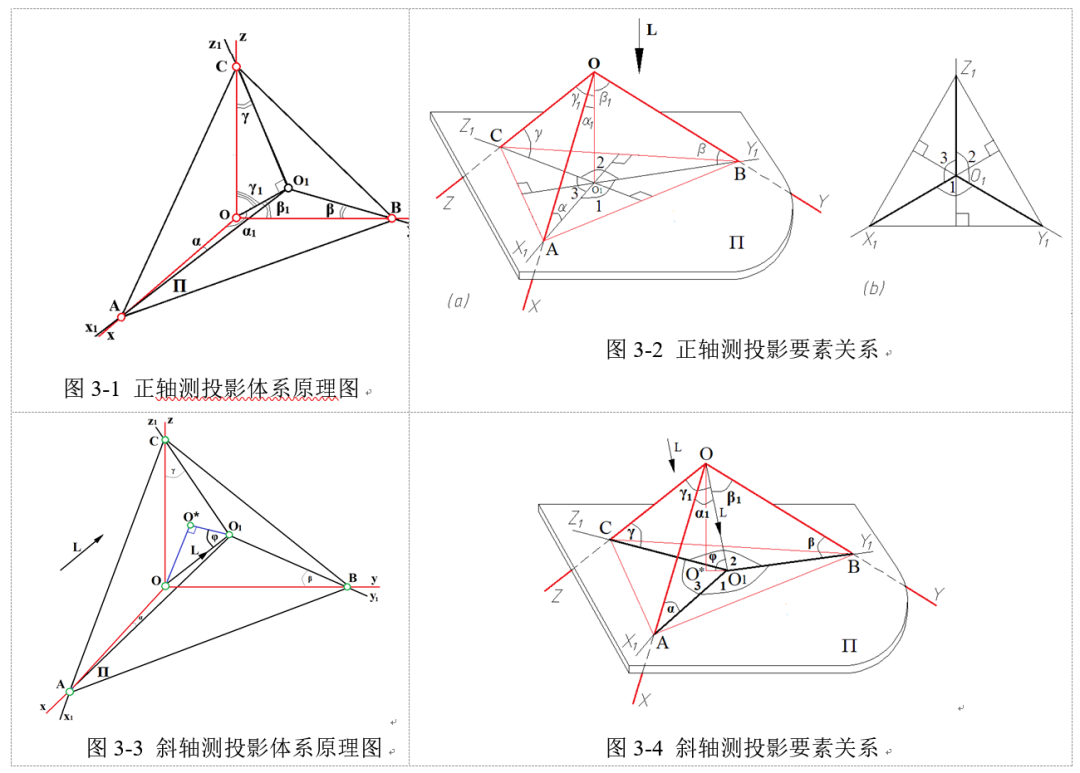
3.4 轴测投影体系参数
1)轴测投影参数
轴测投影体系表述空间坐标系、投射方向、投影面三者之间的几何关系。轴测投影体系也由这三者决定,其基本参数分为空间参数和轴测参数(参阅图3-1 ‐图3-4 )。 空间参数七个: 三直三面空间坐标系Oxyz 、投射方向L 、投影面Π 。其中,L 和Π 都是在Oxyz 下表达的。空间参数包括α 、β 、γ 与α 1 、β 1 、γ 1 和φ 等7 个参数。投射方向与空间坐标系的互相位置由α 1 、β 1 、γ 1 确定。空间坐标系与投影面的互相位置由α 、β 、γ 确定。投射方向与投影面的互相位置由φ 确定。 轴测参数六个。 轴向变形系数η x 、η y 、η z 和轴间角∠1 ,∠2 ,∠3 等共6 个参数可称为轴测参数。他们是在轴测投影图上决定物体空间形状的作图依据。知道了轴间角和轴向变形系数,就可以沿着轴向度量形体的尺寸,也可以沿着轴向量画出形体上各点、各线段和整个形体的轴测投影。 空间7 个参数和轴测6 个参数(参阅图3-1 ‐图3-4 )不全是独立的,他们间有一些制约关系。其中,式(3-1) 称为轴测投影体系的基本公式,它反映了轴测投影中各轴测参数之间的定量关系。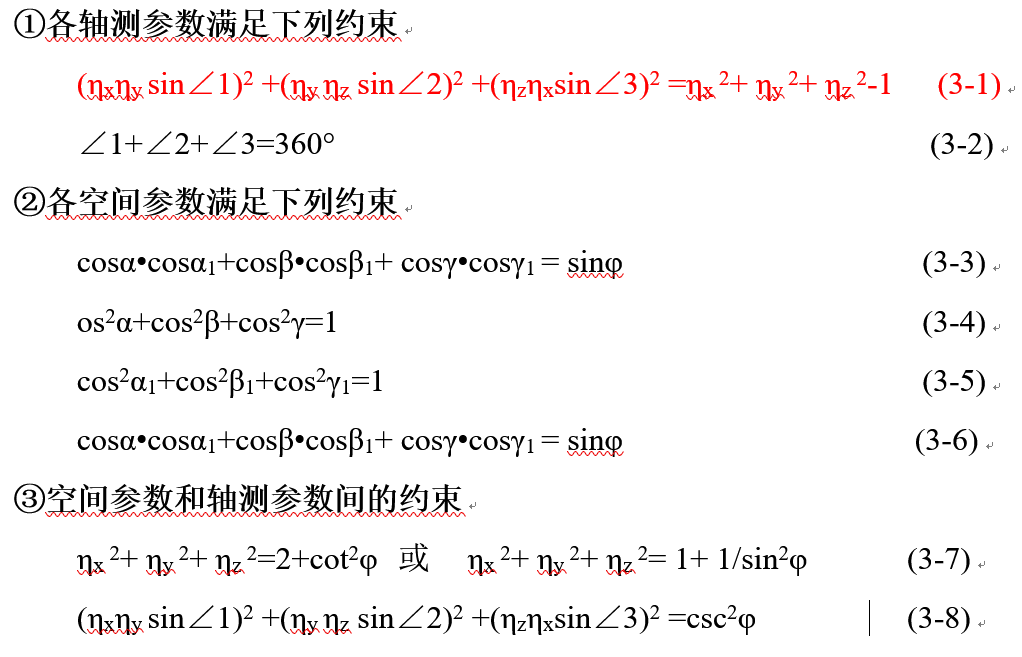
2)轴测投影体系的自由度
一般形式的轴测投影体系有4 个自由度。在基本式(3-1) 中, 3 个轴间角只有 2 个是独立的, 那么基本式本身 也只包含有 5 个独立参数,所以 有4 个自由度,只要任给出其中4 个独立参数,就能求出其余空间参数,从而也就能确定轴测系统的位置。3.5 正轴测投影要素
1)正轴测投影的基本关系式
正轴测投影是轴测投影中的一个特例当投射方向与投影面垂直,即投射角φ=90 ° 时,就是正轴测投影,此时式(3-7) 可化为正轴测投影基本关系式:ηx 2+ ηy 2+ ηz 2=2 (3-9) 将它代入基本式(3-1),就得到 (ηxηysin∠1)2 +(ηy ηz sin∠2)2 +(ηzηxsin∠3)2 =1 (3-10) |
2)正轴测轴向变形系数与轴间角的关系
轴向变形系数η x 、η y 、η z 与轴间角∠1 、∠2 、∠3 间的关系是确定的。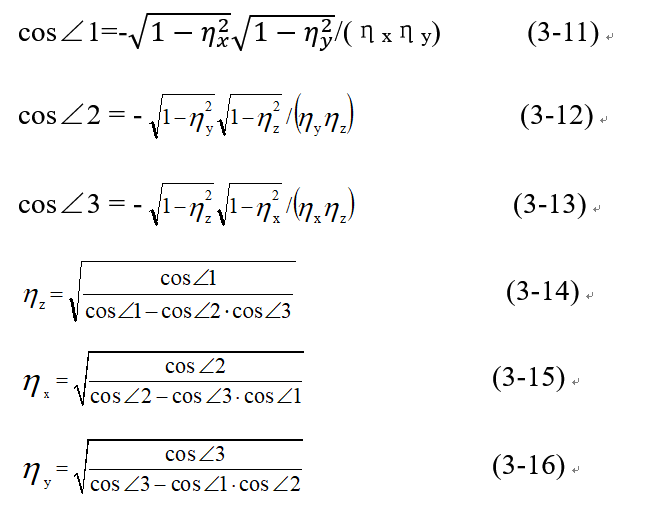
3.6 斜轴测投影要素
1)斜轴测投影的基本关系式
如名所述,斜轴测投影时(图(3-3)~ 图(3-4) ),平行投影的方向 L 是不平行于投影面法线方向的,设它与投影面 △ ABC 成 φ 角,斜轴测投影轴为 O 1A 、 O 1B 和 O 1C ,坐标原点 O 在投影面 △ ABC 上的正投影是 O * 。斜轴测投影时有: η x 2+η y 2+η z 2=1+1/sin 2φ=2+cot 2φ 这是斜轴测投影的基本关系式 —— 投影方向与变形系数之间的关系。斜轴测投影的变形系数的平方和随投射线对轴测投影面的夹角而变化。2)空间参数与轴测参数间的关系
在斜轴测投影中,还有以下的结论:笛卡尔坐标轴(空间参数)与对应的轴测投影轴(轴测参数)的放射比(轴向变形系数)和他们两者的夹角余弦的乘积之和等于 2 ,即有:ηx cosα+ηycosβ+ηzcosγ=2 (3-17) 但与正轴测投影不同,在斜轴测投影中,下列三式不成立:cosα=ηx,cosβ=ηy,cosγ=ηz但是有:ηx (cosα-ηx)+ηy(cosβ-ηy)+ηz(cosγ-ηz)=-ctg2φ (3-18) |
3.7 投影面和轴测轴的求取
投影面改变的本质是投影方向的改变,即投射方向的改变。 投影面问题。 投影面选择的本质是投射方向的选择, 投射方向的改变是相对的! 方式一,可以是形体不动,改变投影面。 这常是一种斜投影方式。 方式二,固定投影面,对形体作空间变换。 这常是一种正投影方式。 方式一多用于理论研究,方式二多用于实际应用,工程制图中就用坐标平面作为投影面。 坐标轴问题。 “ 形体连同它的三个坐标轴向设定的投影面投影” ,轴测图是依赖于坐标轴的,需要在投影中附件上笛卡尔坐标系。现在轴测图的绘制先决定坐标轴(轴测轴)。1)方式一:固定形体寻找投影面
先讨论固定形体,形体在这样的局部坐标系下表示:它至少有一个主面平行于坐标平面。在总坐标系下决定一个投影面P ,给出P 的一个表达形式:P 面上的一个点,和P 在总坐标系下的单位法向量,使得形体在P 面上的投影是形体的轴测图。 ① 正等测图投影面的决定 轴测投影初始是得到正等测投影,投影面P 的法向与总坐标系三个坐标轴有相同的夹角,所以它在总坐标系的单位法向是: N p(0.,0., 0.)。 图3-6 和图3-7 是正等测在不同轴测图下显示的投影原理图。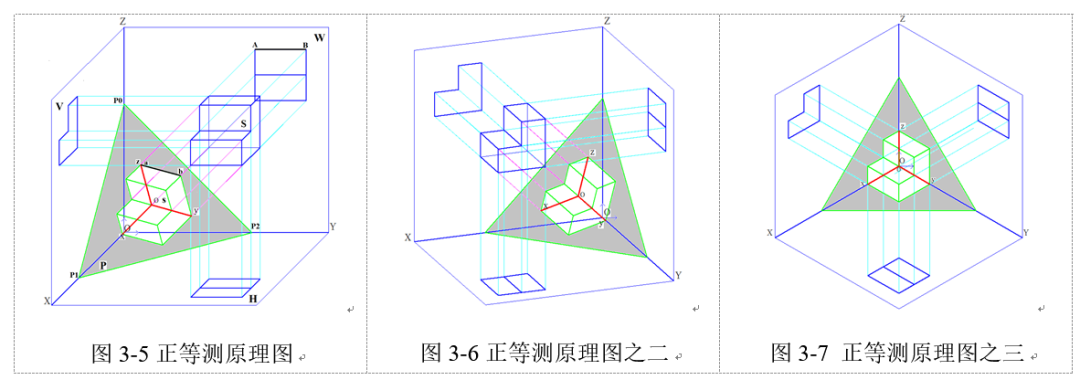
2)方式二:固定投影面而变换形体
这是产生轴测变换的另一种方式: 通过对空间形体的旋转或者错切变换,将轴测投影转化为正投影。方法如下(图3-11-图3-13)。 ①正等测图。如果以x-y平面作为投影面,在这个面上产生正等测图。那么可先将空间形体绕y轴旋转-45˚,再绕x轴正旋转35.26442 ˚(35˚15.865')然后向x-y平面投影(取x、y坐标),得到正等测图。 ②正二测图。如果将空间形体绕y轴旋转-69.˚(-69˚17'10''),再绕x轴正旋转19.47122˚(19˚28'16''),然后向x-y平面投影(取x、y坐标),得到正二测图。 ③斜二测图。先沿x向错移-0.3535且离开z轴(T[3,0]=-0.3535),然后沿y轴错移-0.3535且离开z轴(T[3,1] =-0.3535),然后向x-y平面投影(取x、y坐标),得到斜二测图。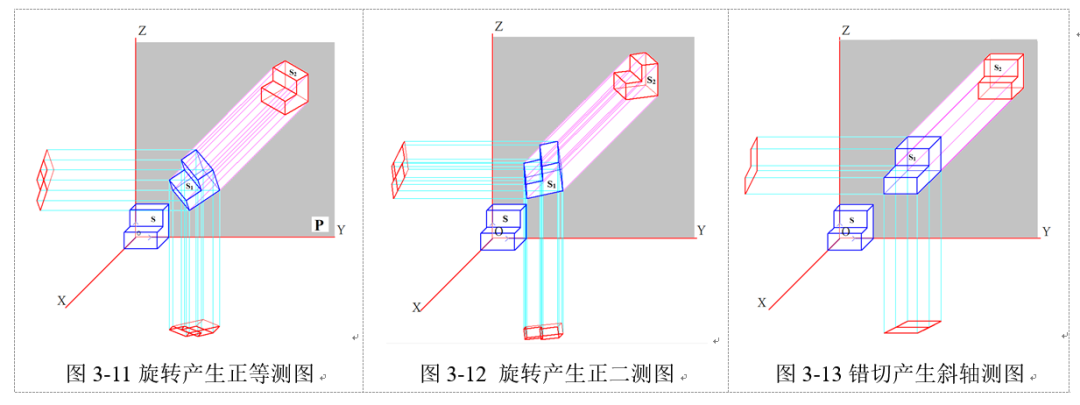
4 透视投影法
4.1透视的基本概念
“透视”是一个绘画理论术语,通过一块透明的平面去看景物,在平面上所见的景物的画面就是该景物的 透视图 。将这个现象抽象,就是把视点固定为一点,观测者的视点与空间形体轮廓的各个点形成的一系列视线与画面的交点在平面上按照空间形体的构造用线条来显示形体的 空间位置 、轮廓,描绘可较好的显现出空间形体之间的远近和层次关系。 透视体系先设定一个画面V 和一个视点E ,由视点E 出发,与描述空间形体轮廓的各个定点连接形成一系列的直线,这些直线将与画面V 产生的交点,遵照空间形体轮廓原来的连接次序连接起来,就构成了该空间形体在画面上的透视图。 如图4-1 所示,形体底面所在的平面称为基面,常选取水平面或地平面(图4-1 中H 平面),基面在透视投影系统中称为物面或地面,因为被绘形体放在这个平面上。在建筑透视中常有这样的表述:观察者所站立的水平地面,或形体所在的水平面。 为了用齐次矩阵描述一个透视变换,先要构筑一个参考坐标系xyz 。在计算机里表述时,一般将画面(V 面)设为xy 坐标平面,基面(H 面)设为y=0 坐标平面,y 轴表示高度,视点在z 轴正向,而形体放在z 轴负向。 下面给出透视体系的一些术语。基面:形体底面所在的平面称为基面。 画面:垂直于基面H的平面V是投影面,又称为图画平面或画面。 视点:点E是投影中心,相当于观察者眼睛的位置,通常称为视点。 站点:视点E在基面上投影e称为站点(在建筑透视中将站点定义为观察者站立的位置)。 视高:视点到基面的距离,即人眼到地面的高度。 视心:视点E在画面的投影点E0称为视心,也称主点。 视距:线段E0E表示视点至画面之距离,称为视距。 画面中线:在画面上通过视心E0的铅垂线E0e0称为画面中线。 基线:画面与基面的交线gg'称为画面的基线。 视线:即投射线,视点与形体上任一点的连线。 视平线:通过视点E的水平面(EGG')与画面V的交线GG'称为视平线。 空间点:A、B、C表示空间的点。 点的透视:通过任一点的视线与画面的交点,如 A0、B0、C0。 基点:空间各点在基面H平面上的投影。如a、b、c分别表示A、B、C的基点。 基透视:形体的基面投影到透视,如a0、b0、c0。 |
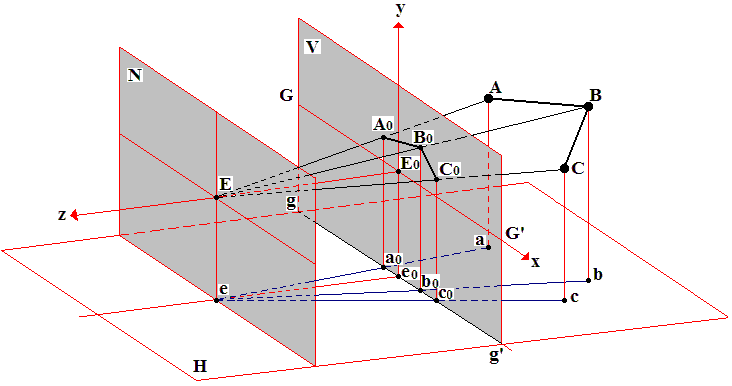
图4-1 透视体系
4.2透视的类型
透视的一个关键要素是“ 灭点” 的概念,与画面不平行的空间直线的无限远点在画面上的透视点称为灭点,一组平行的直线有同一个灭点。空间形体主方向平行直线的灭点称为主灭点。根据灭点的个数,透视变换可以分成平行透视( 一灭点) 、成角透视(两灭点透视)和三灭点透视等3 种类型,而三灭点透视又可分为由旋转方法产生和通过倾斜画面产生,产生方法将在后面详细叙述。建筑图常用倾斜画面产生三灭点透视图。表4-1 列出了一些透视的类型。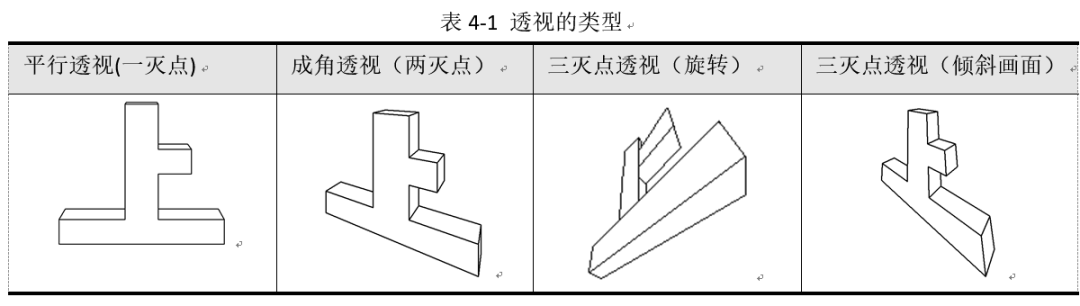 4.3透视参数的设定
4.3透视参数的设定
表4-2绘制透视图时参数的经验值
类型 |
参数 |
说明 |
| 水平视角 | 140-176° |
一只眼睛时,120-148° |
垂直视角 |
110-125° |
一只眼睛时,110-125° |
清晰视野 |
28-37° |
清晰视野将视野看成圆锥形,可达90°,一般不超过60°。 |
圆锥顶角 |
60° |
应使形体全部落在顶角为60°的视圆锥内。 |
视点选择 |
圆锥顶角约为28°,一般取30°。视点过近,失真,过远,透视不明显。 |
|
站点 |
站点引出的与建筑物相接触的两边缘视线间的夹角约为30° |
|
视点高度 |
1.5-1.8米 |
视点高于建筑物,产生鸟瞰图;视点低于建筑物,产生仰望透视图。 |
一点透视 |
使形体上两组主向直线(正平线和铅垂线)平行于画面。 |
|
二点透视 |
使形体上一组铅垂主向直线平行于画面,另两组主向直线与画面相交。 |
|
三点透视 |
当画面倾斜于地面时,三组主向直线均与画面不平行。 |
5 标高投影法
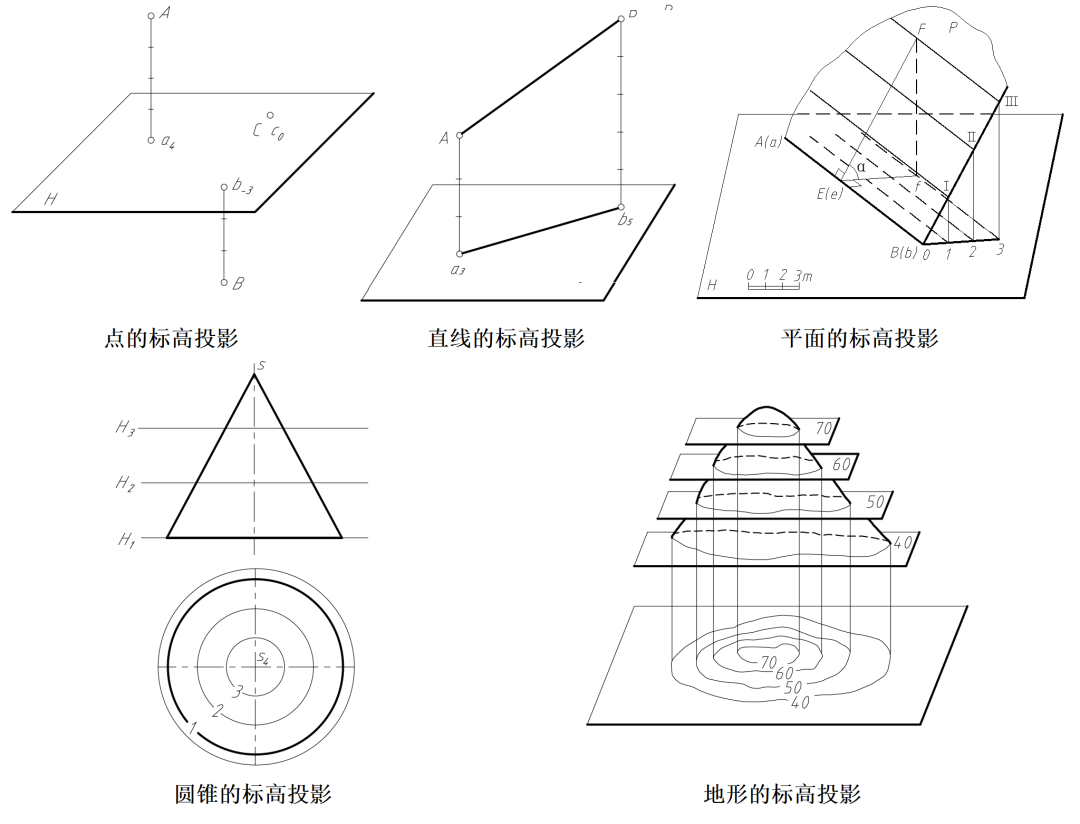
标高投影法是一种单面正投影,用以表达那些水平尺度较大、竖向尺度相对较小、形体又不规则的物体,如地形地貌、河床、堤坝、道路等(图5-1 )。 标高投影法是唯一一个用投影图表示二维形状,而用数字直接表示第三维度量的投影方法。 标高投影法采用一种特殊的方法去表述空间的三个维度,在水平投影面上反映出形体特征的水平正投影图形去表述两个维度,而在每个截面上用数字标志该截面的高度去表述形体的第三维。用这个方法也可以完全确定物体的空间形状和位置。 标高投影法同样有点、直线、平面和平面立体、 曲线、曲面和曲面立体的标高投影。
图5-1标高投影图 |
6 投影计算化
6.1三视图
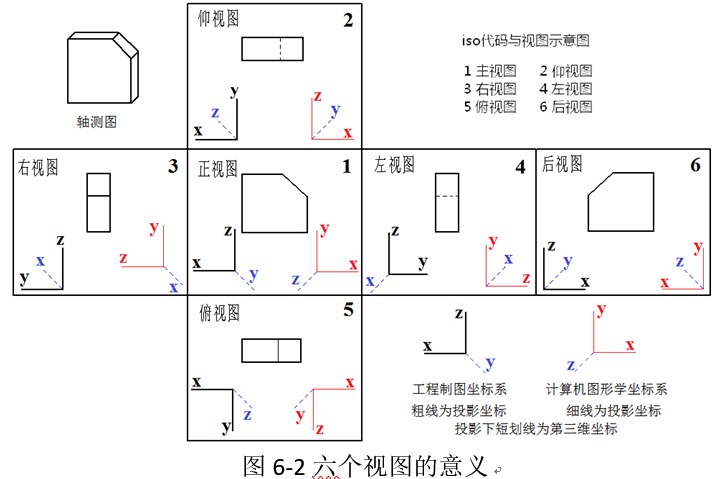
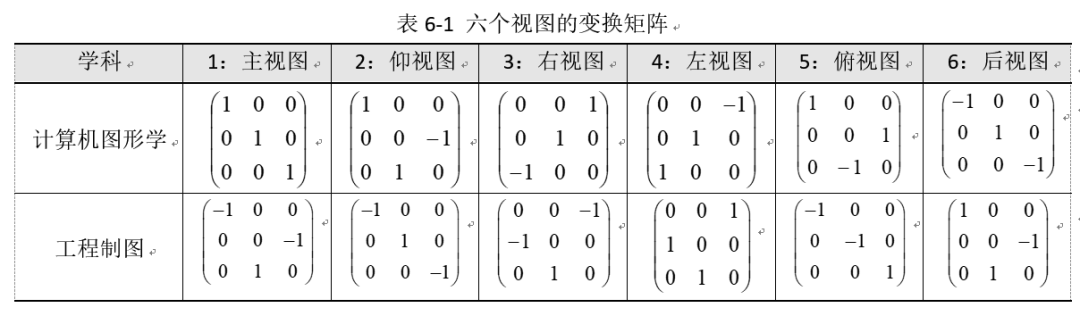
“长对正、高平齐、宽相等”的三等关系是三面投影图的基本规律,把相关的投影图共同对照、分析、思考,识别形体的实际情况,是制图与读图的基本方法(图6-1 )。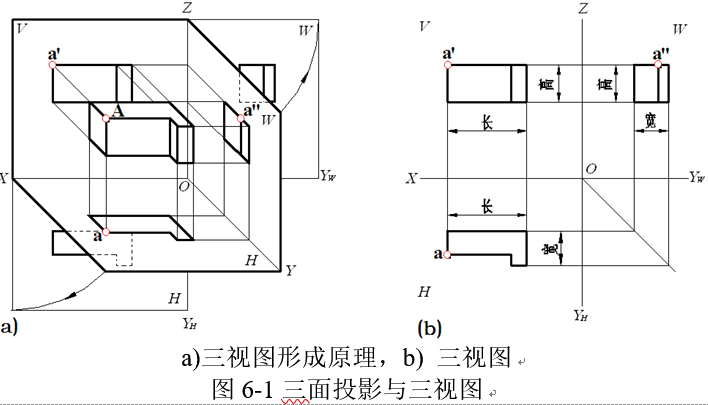 为了更广泛的应用和三视图的计算化,下面给出六个视图(图6-2 )的变换矩阵(表6-1 ),经过变换后均取x*y* 坐标即可得到相应的视图,保留的第三维坐标供三维处理之用。
为了更广泛的应用和三视图的计算化,下面给出六个视图(图6-2 )的变换矩阵(表6-1 ),经过变换后均取x*y* 坐标即可得到相应的视图,保留的第三维坐标供三维处理之用。
 6.2 轴测变换
6.2 轴测变换
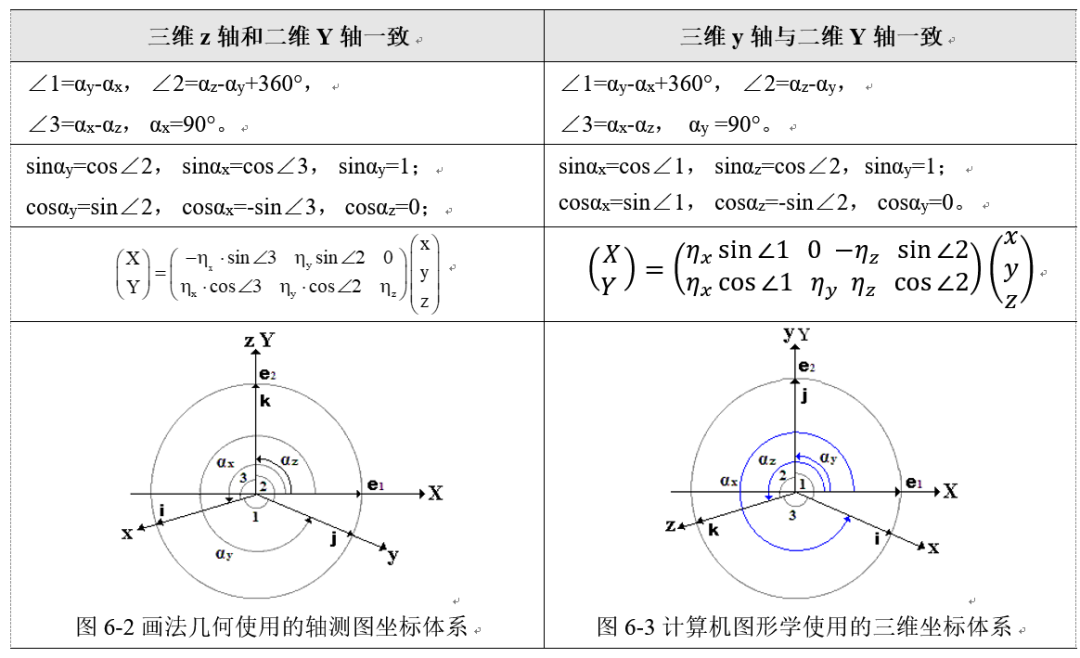
 为了应用轴间角来代替上述公式,可选取三维 z 轴和二维 Y 轴一致(机械学常用,图 6-2 )或三维 y 轴与二维 Y 轴轴一致(计算机图形学常用,图 6-3 ),分列如下:
为了应用轴间角来代替上述公式,可选取三维 z 轴和二维 Y 轴一致(机械学常用,图 6-2 )或三维 y 轴与二维 Y 轴轴一致(计算机图形学常用,图 6-3 ),分列如下:
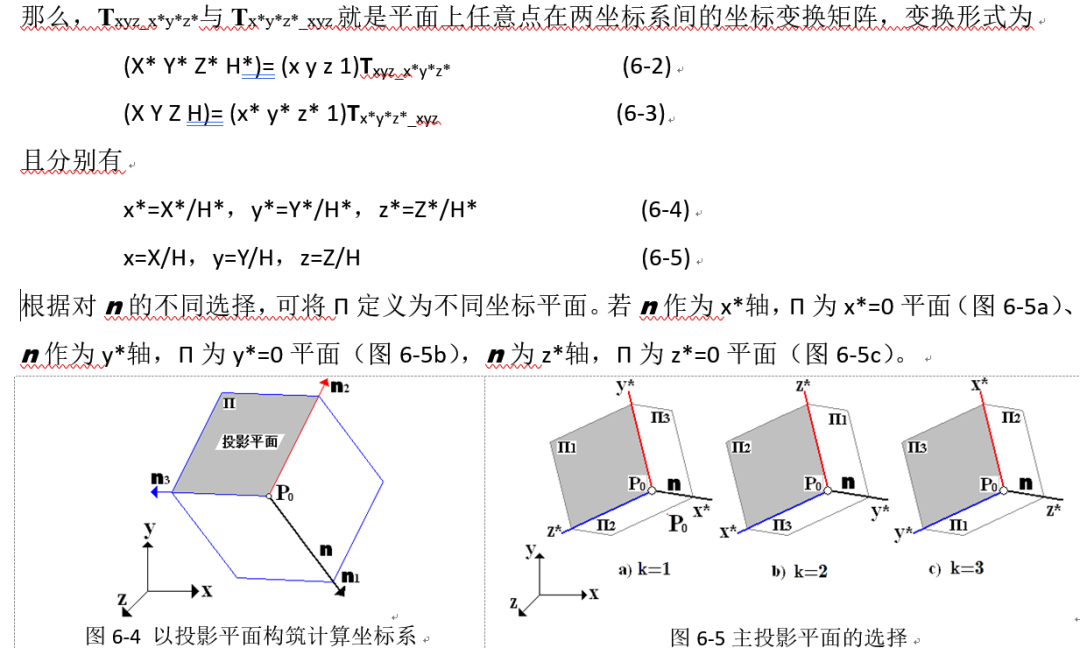
 6.3向任意面的正投影 先构建一个新的坐标系,将新投影面S 作为新坐标系的z*=0 坐标平面,在这个新坐标系O*x*y*z* 下向平面S 上的投影就变成向z*=0 坐标平面的正投影了。 设原xyz 坐标系下新投影面S 由一点P
0(x
0,y
0,z
0) 和单位向量
n(a b c) 构造,以P
0 为坐标原点,向量
n 为新的坐标轴(x* 或y* 或z* ),构筑新的坐标系x*y*z* (图6-4 )。 将向量
n(a b c) 设为向量
n
1 (a
1 b
1 c
1) ,即a
1=a ,b
1=b ,c
1=c ; 从P
0(x
0,y
0,z
0) 出发的3 条互相垂直的单位向量
n
1 、
n
2 和
n
3 就构成以P
0 为坐标系原点,以
n
1 为x* 轴,
n
2 和
n
3 分别为y* 和z* 轴的新坐标系x*y*z* (图6-5 )。 构筑以下2 个矩阵:
6.3向任意面的正投影 先构建一个新的坐标系,将新投影面S 作为新坐标系的z*=0 坐标平面,在这个新坐标系O*x*y*z* 下向平面S 上的投影就变成向z*=0 坐标平面的正投影了。 设原xyz 坐标系下新投影面S 由一点P
0(x
0,y
0,z
0) 和单位向量
n(a b c) 构造,以P
0 为坐标原点,向量
n 为新的坐标轴(x* 或y* 或z* ),构筑新的坐标系x*y*z* (图6-4 )。 将向量
n(a b c) 设为向量
n
1 (a
1 b
1 c
1) ,即a
1=a ,b
1=b ,c
1=c ; 从P
0(x
0,y
0,z
0) 出发的3 条互相垂直的单位向量
n
1 、
n
2 和
n
3 就构成以P
0 为坐标系原点,以
n
1 为x* 轴,
n
2 和
n
3 分别为y* 和z* 轴的新坐标系x*y*z* (图6-5 )。 构筑以下2 个矩阵:


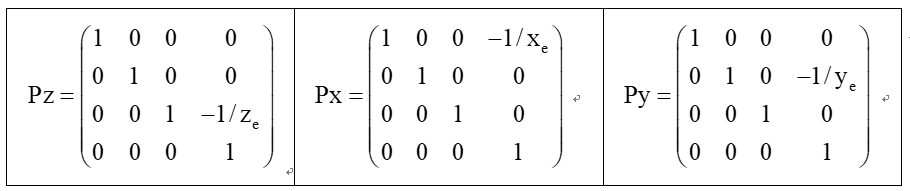 变换式为下列三者之一: (X Y Z H)=(x y z 1)P
z ( XY Z H)=(x y z 1)P
x (X Y Z H)=(x y z 1)P
y
变换式为下列三者之一: (X Y Z H)=(x y z 1)P
z ( XY Z H)=(x y z 1)P
x (X Y Z H)=(x y z 1)P
y
6.6 透视投影转化为平行投影
定理:对一个空间形体,一定存在另一个空间形体,使前者在画面上的透视投影与后者的平行投影是一样的,且保留了深度方向的对应关系 。 这个变换就是上节(6.5 透视变换)的三个变换之一。它将空间线段AB 变换成空间线段A'B' ,AB 在画面上的透视投影与A'B' 在画面上的正投影是一致的,均为A"B" ,且保留了他们在空间的前后关系(图6-6 )。 这个定理可使复杂的透视投影转化成简单的平行投影,使计算大为简化。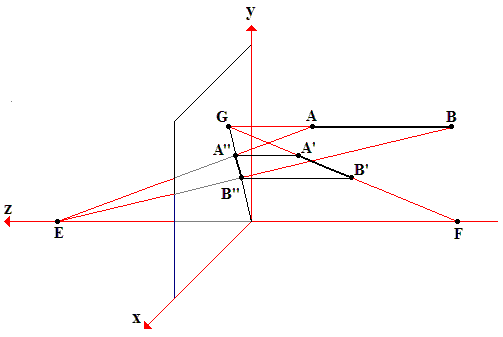
图6-6透视投影转化为平行投影的机理
6.7透视投影的两种方式 与画面成一角度的平行直线经透视变换后,它们在投影平面上交于一点,此类点就被称作透视投影的灭点。因此,一般可采用两种不同的方法使形体的主体与画面成一角度,从而获得透视图: 一是保持画面铅垂而通过旋转形体使之与画面构成一个角度以达到透视变换效果。 二是通过倾斜投影画面而达到透视变换效果。1)通过旋转生成透视图
先介绍“保持画面铅垂而通过旋转形体使之与画面构成一个角度以达到透视变换效果”的 方法。分别进行不同次数的旋转变换,再施以透视变换P Z (式9.6-3 )后,分别得到一灭点(不旋转)、二灭点(1 次旋转)和三灭点(2 次旋转)矩阵。 1 )平行透视(一灭点) 由于EP z=P z ,因此透视变换后的x 、y 、z 无穷远点将变为P z 的前三行(1 0 0 0) 、(0 1 0 0) 和(0 0 1 -1/z e) (它表示三个点)。这说明原来平行于x 轴和y 轴的向量仍互相平行,而平行于z 轴的向量则交于一点(0,0) 。 2)成角透视(二灭点) 如果把单位立方体绕 y 轴转 α y 角,再 施 以透视变换 Pz ,即得二灭点透视变换: 由矩阵第一行可知,原来平行于x 轴的向量将在投影平面xoy 上有灭点(ctgα
y∙z e ,0) ;由矩阵第三行可知,原来平行于z 轴的向量将在投影平面xoy 上汇集于灭点(-tgα
yz e ,0) 。
3)三灭点透视 将形体绕x 轴转α
x 角,再绕y 轴转α
y 角,最后施以透视变换P
z 即得三灭点透视变换:
由矩阵第一行可知,原来平行于x 轴的向量将在投影平面xoy 上有灭点(ctgα
y∙z e ,0) ;由矩阵第三行可知,原来平行于z 轴的向量将在投影平面xoy 上汇集于灭点(-tgα
yz e ,0) 。
3)三灭点透视 将形体绕x 轴转α
x 角,再绕y 轴转α
y 角,最后施以透视变换P
z 即得三灭点透视变换:
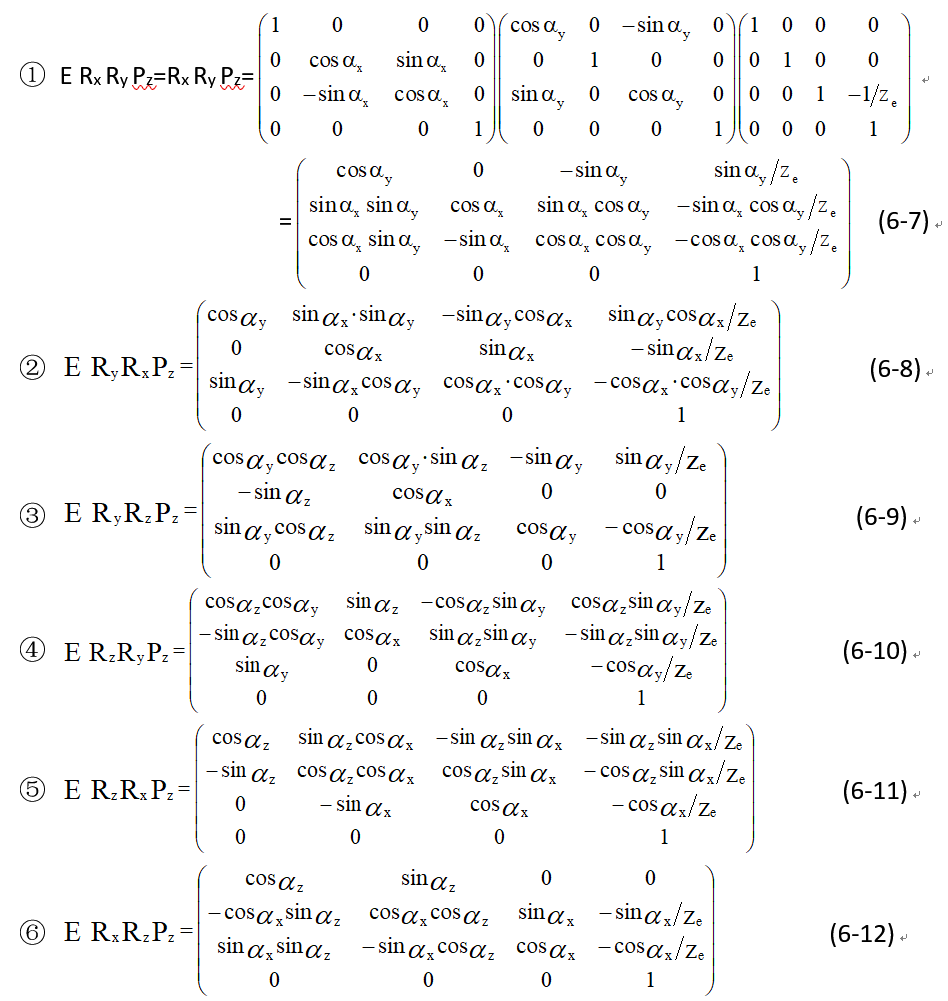 表6-2列出了通过对形体进行不同的旋转并施以透视变换Pz后产生的一、二、三个灭点的情况。从表中可以看出,如果分别采用1、3和6三种旋转变换,它们可以保证经透视投影后形体不出现倾斜状态,是实际应用中(例如建筑透视)的三种较好的透视变换矩阵。
表6-2列出了通过对形体进行不同的旋转并施以透视变换Pz后产生的一、二、三个灭点的情况。从表中可以看出,如果分别采用1、3和6三种旋转变换,它们可以保证经透视投影后形体不出现倾斜状态,是实际应用中(例如建筑透视)的三种较好的透视变换矩阵。
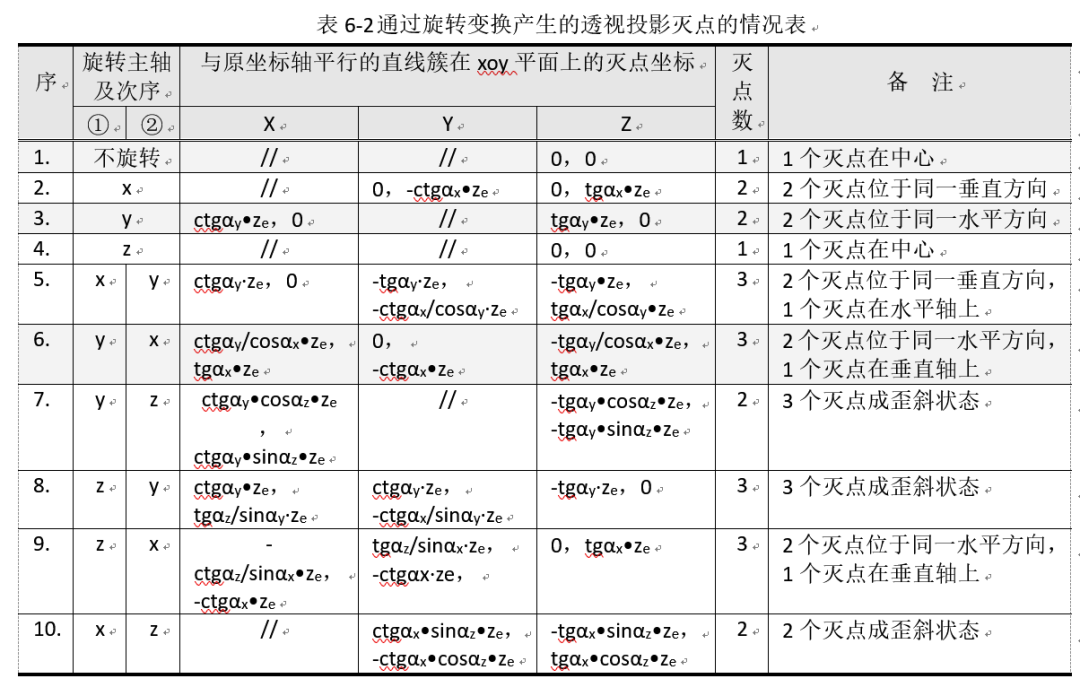
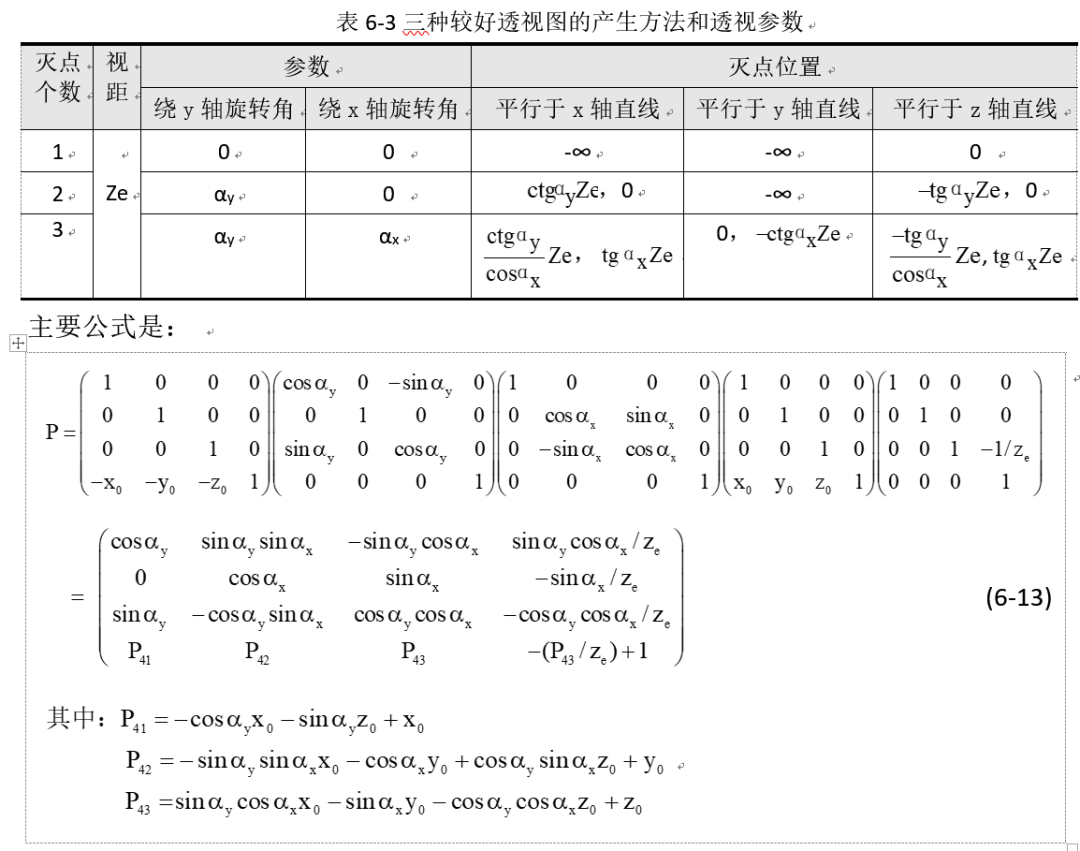
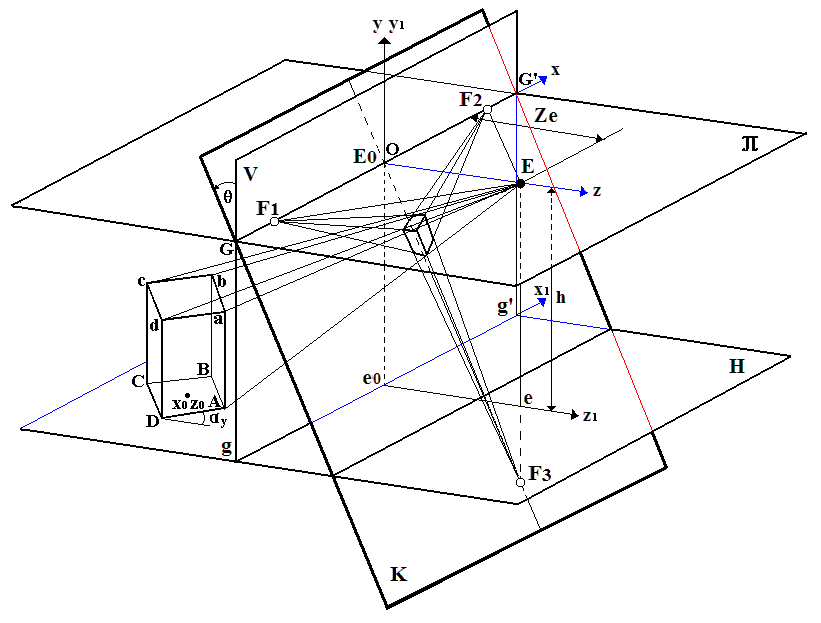
图6-7 倾斜画面得到三灭点透视原理图
设物体原已建立在如下的坐标系 e 0 x 1 y 1 z 1 上:以 H 面为 y 1 =0 平面, e 0 e 1 为 z 1 轴。画面 K 与垂直坐标平面 z 1 =0 的夹角为 θ 。 |eE| =h , e 0 e 1 =z e 。建立一个由物体的原坐标系 e 0 x 1 y 1 z 1 从原点 e 0 平移到 E 0 而得到的新的坐标系 E 0 xyz (即 Oxyz )。可求得视点在 E ,画面为 K 的透视变换阵:
投影法 |
投影策略 |
立方体投影方式 |
正投影 |
多(三)面平行正投影 |
三直三面角三平面平行于坐标平面 |
轴测投影 |
单面平行(正或斜)投影 |
三直三面角同时可见平行投影于投影面 |
透视投影 |
单面中心投影 |
三直三面角同时可见中心投影于投影面 |
标高投影 |
单面平面投影图+数字第三维 |
水平投影+数字标高 |
参考文献
[1] 何援军,几何计算,北京:高等教育出版社,2013年3月

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
如需转载请保留出处:https://bianchenghao.cn/bian-cheng-ji-chu/87895.html