
注:本笔记仅为了能对机械结构以及设计有一些基本了解。可以大致听懂看懂机械的设计思路且能够与设计人进行正常交谈。(不至于带点专业名词就蒙圈)
机械,机构和机器
机械 是 机构 和 机器 的统称。
机构:用来传递和变换运动和力。 如下:凸轮机构,将旋转运动变为直线运动
机器:通常根据某种要求而设计用来变换能量,物料和信息的执行机械运动装置。机器由各种机构组合而成。
构件与连接
构件:任何机器都是由零件组成。有些单独作为一个运动单体而运动。而有些则是通过刚性连接组合从而作为一个整体运动。这个由零件组成的单个独立的运动单体就叫做构件
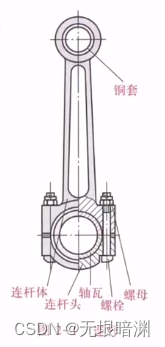
运动副:由两个构件直接接触构成的可运动连接
构件和构件连接必须通过运动副
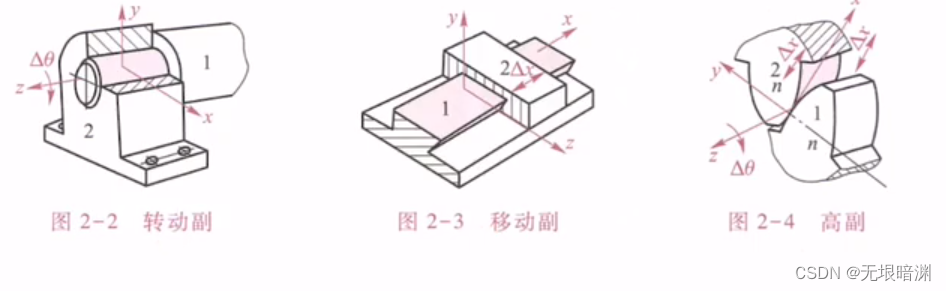
- 低副:面接触,受力面积大,受到的应力小
- 高副:线/点接,:受力面积小,受到的应力大
相对运动为转动的称为转动副或回转副,也叫铰链,代号为 R
相对运动为平移的称为移动副,代号为 P
相对运动为螺旋运动的称为螺旋副,代号为 H
运动副自由度:运动副中两组件可以产生的相对运动种类数
- 在空间中最多有6种自由度:沿x,y,z轴移动;沿x,y,z轴转动。
- 在平面中最多有3种自由度:沿x,y轴移动,沿平面转动
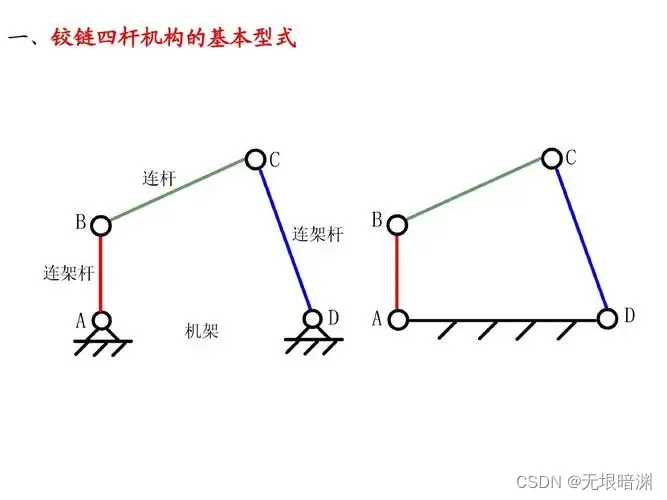
连架构件:连接机架与其他机构的机构
- 曲柄:能做整周运动的连架杆
- 摇杆:能在一定范围内摆动的连架杆
连接方式
固连:刚性连接,无相对位移
啮合:线接触的高副,通常表示两齿轮的连接。
机构确定运动的条件
机构的自由度:机构能够确定运动时必须具有的独立(主动)运动参数的数目,以F表示。
当主动运动件数小于机构的自由度时,机构运动不完全确定
当主动运动件数等于机构的自由度时,机构运动确定
当主动运动件数大于机构的自由度时,通常会损坏机构内最薄弱的部分
最小阻力定律:当主动运动件数小于机构的自由度时,构件优先沿阻力最小的方向运动
如:转动副通常优先于移动副运动
平面机构自由度计算
平面运动中,每个构件具有3个自由度。低副提供2个约束,高副提供1个约束。
自由度公式: F = 3n - 2PL - PH(3*构件数 - 2*低副数 - 高副数)
组成原理:
由于当机构的自由度等于主动件数时,机构具有确定运动。所以对于具有确定运动的机构,将 机架 和 与机架相连的主动件 拆下,其余的构件是一个自由度为0的构件组。
有的自由度为0的构件组还可以进一步拆分成更为简单的0自由度构件组,我们将最简单的不能拆分的构件组称为基本杆组,简称杆组。杆组至少具有两个构件。
任何机构都可以看成由若干个基本杆组依次连接于主动件上和机架上而构成。
故对机构进行运动分析时,可将机构分解为 机架, 主动件, 基本杆组(多个)。然后对相同的基本杆组以相同的方法进行分析。
反之,在在设计机构时,可先选定一个机架,在机架上设置自由度F个主动件,再将基本杆组 依次链接到机架和主动件上。
注:
- 不能同一杆组的各个外接运动副接于同一个构件上,否则起不到增加杆组的作用。
- 在图中当两个以上构件连接到同一处转动副上,此转动副为可能为复合铰链,要以多个转动副计算
结构分类:
基本杆组需要遵循 3n-2PL-PH = 0
Ⅱ级组:由2个构件和3个低副组成,如下:
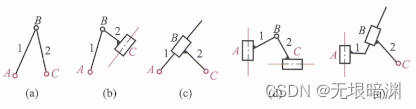
Ⅲ级组:由4个构件和6个低副组成,其中包含一个有3个低副的构件,如下
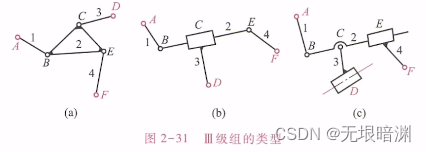
n级机构:基本杆组最大为n级组(如最大为Ⅲ级杆组的机构为Ⅲ级机构)
Ⅰ级机构:只有机架和主动件组成的机构。
分析方法:
在分析时,优先确定 自由度 和 主动件。先将机架和主动件拆分,然后从远离主动件的方向,优先以低级杆组的形式拆解。
有时,选用不同的构件作为主动件,会导致同一机构的级别改变。
常用构件:
类别:
标准件:标准件是指结构、尺寸等各个方面已标准化,有多种不同但固定的规格(如:轴承,螺丝)
通用件:指在不同类型或同类型不同规格的产品中可以互换使用,给予通用编号
螺杆:

丝杠:
当螺杆旋转时,螺母相对与机架做平移运动。

顶丝:起固定作用,大多是轴孔,用顶丝顶住轴,使它不能来回移动。

经典机构:
经典连杆机构:
凸轮机构:
齿轮系机构:

三大配合:
过盈配合:依靠轴与孔的过盈值,装配后使零件表面间产生弹性压力,从而紧固的联接。但仅靠摩擦力可能会导致打滑(如:联轴器)
过渡配合:介于过盈和间隙之间,适用于高精度相对运动的零件,如齿轮和齿轮之间。
间隙配合:适合需要相对运动的零件,如轴和轴承的配合。也可贮藏润滑油、补偿各种误差等。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
如需转载请保留出处:https://bianchenghao.cn/bian-cheng-ji-chu/82773.html